 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Minimal Closed-Form Solution for Multi-Perspective Pose Estimation using Points and Lines
Paper and Code
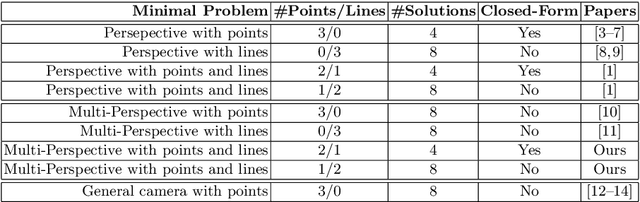
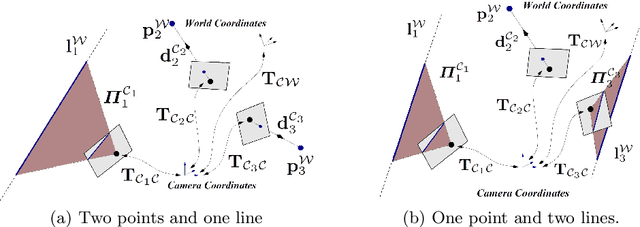
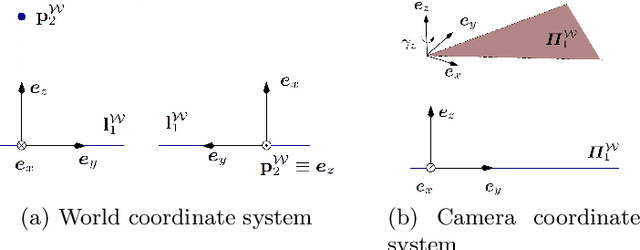

We propose a minimal solution for pose estimation using both points and lines for a multi-perspective camera. In this paper, we treat the multi-perspective camera as a collection of rigidly attached perspective cameras. These type of imaging devices are useful for several computer vision applications that require a large coverage such as surveillance, self-driving cars, and motion-capture studios. While prior methods have considered the cases using solely points or lines, the hybrid case involving both points and lines has not been solved for multi-perspective cameras. We present the solutions for two cases. In the first case, we are given 2D to 3D correspondences for two points and one line. In the later case, we are given 2D to 3D correspondences for one point and two lines. We show that the solution for the case of two points and one line can be formulated as a fourth degree equation. This is interesting because we can get a closed-form solution and thereby achieve high computational efficiency. The later case involving two lines and one point can be mapped to an eighth degree equation. We show simulations and real experiments to demonstrate the advantages and benefits over existing methods.