Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA metric for evaluating 3D reconstruction and mapping performance with no ground truthing
Paper and Code
Jan 25, 2021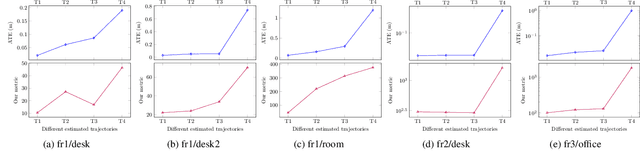
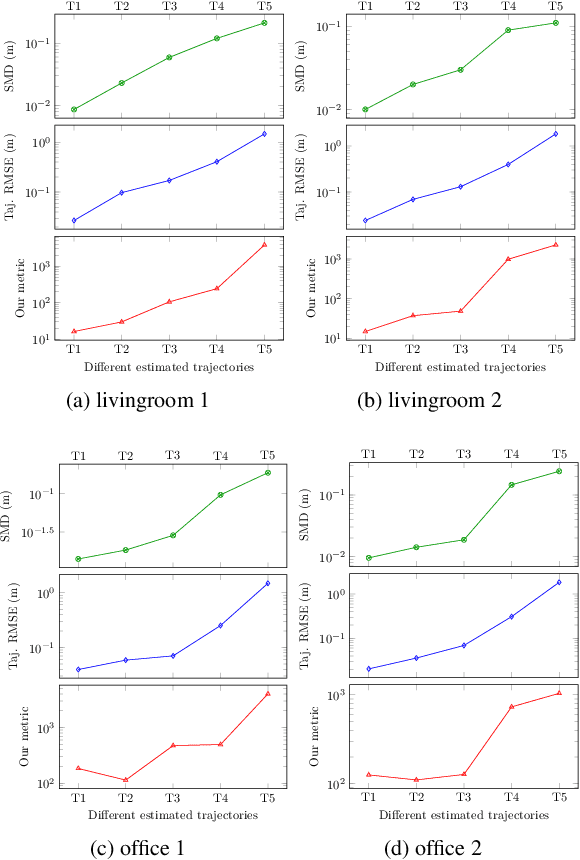
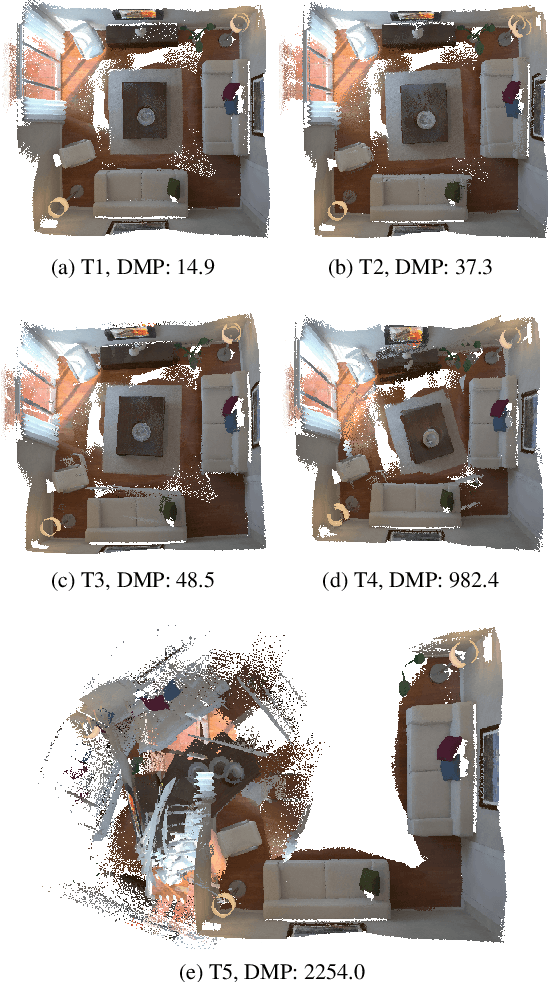
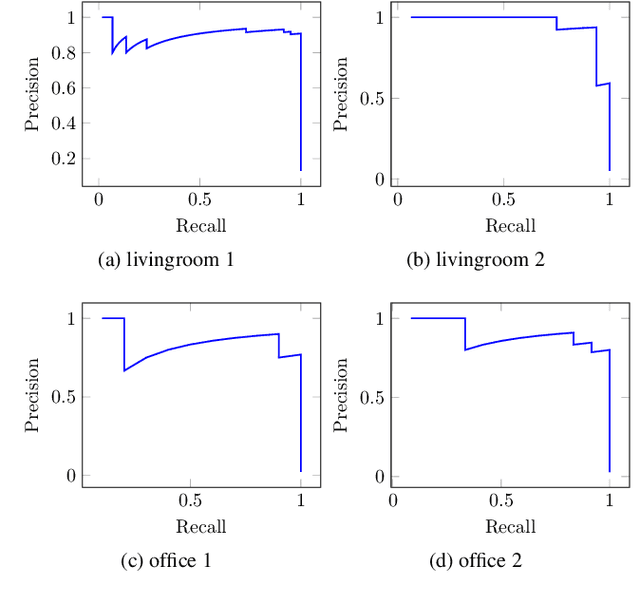
It is not easy when evaluating 3D mapping performance because existing metrics require ground truth data that can only be collected with special instruments. In this paper, we propose a metric, dense map posterior (DMP), for this evaluation. It can work without any ground truth data. Instead, it calculates a comparable value, reflecting a map posterior probability, from dense point cloud observations. In our experiments, the proposed DMP is benchmarked against ground truth-based metrics. Results show that DMP can provide a similar evaluation capability. The proposed metric makes evaluating different methods more flexible and opens many new possibilities, such as self-supervised methods and more available datasets.
View paper on