 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Little Fog for a Large Turn
Paper and Code
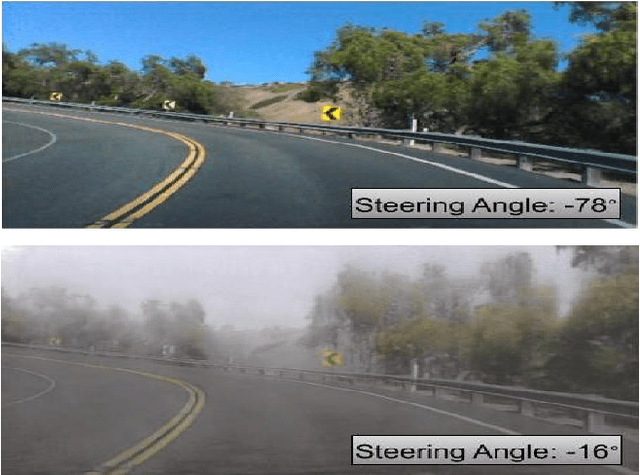
Small, carefully crafted perturbations called adversarial perturbations can easily fool neural networks. However, these perturbations are largely additive and not naturally found. We turn our attention to the field of Autonomous navigation wherein adverse weather conditions such as fog have a drastic effect on the predictions of these systems. These weather conditions are capable of acting like natural adversaries that can help in testing models. To this end, we introduce a general notion of adversarial perturbations, which can be created using generative models and provide a methodology inspired by Cycle-Consistent Generative Adversarial Networks to generate adversarial weather conditions for a given image. Our formulation and results show that these images provide a suitable testbed for steering models used in Autonomous navigation models. Our work also presents a more natural and general definition of Adversarial perturbations based on Perceptual Similarity.