 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA learning-based approach to multi-agent decision-making
Paper and Code
Dec 23, 2022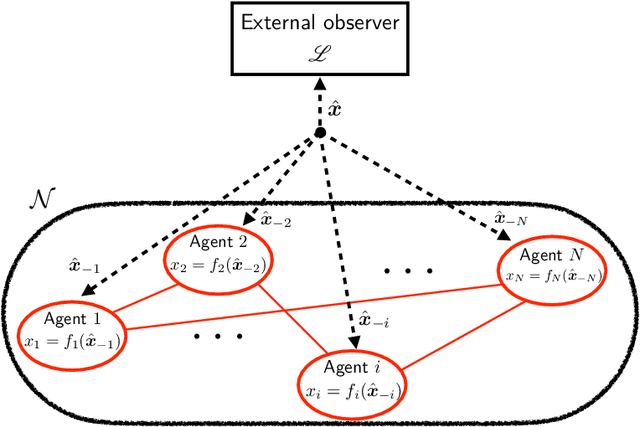
We propose a learning-based methodology to reconstruct private information held by a population of interacting agents in order to predict an exact outcome of the underlying multi-agent interaction process, here identified as a stationary action profile. We envision a scenario where an external observer, endowed with a learning procedure, is allowed to make queries and observe the agents' reactions through private action-reaction mappings, whose collective fixed point corresponds to a stationary profile. By adopting a smart query process to iteratively collect sensible data and update parametric estimates, we establish sufficient conditions to assess the asymptotic properties of the proposed learning-based methodology so that, if convergence happens, it can only be towards a stationary action profile. This fact yields two main consequences: i) learning locally-exact surrogates of the action-reaction mappings allows the external observer to succeed in its prediction task, and ii) working with assumptions so general that a stationary profile is not even guaranteed to exist, the established sufficient conditions hence act also as certificates for the existence of such a desirable profile. Extensive numerical simulations involving typical competitive multi-agent control and decision making problems illustrate the practical effectiveness of the proposed learning-based approach.