 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lagrangian Gauss-Newton-Krylov Solver for Mass- and Intensity-Preserving Diffeomorphic Image Registration
Paper and Code


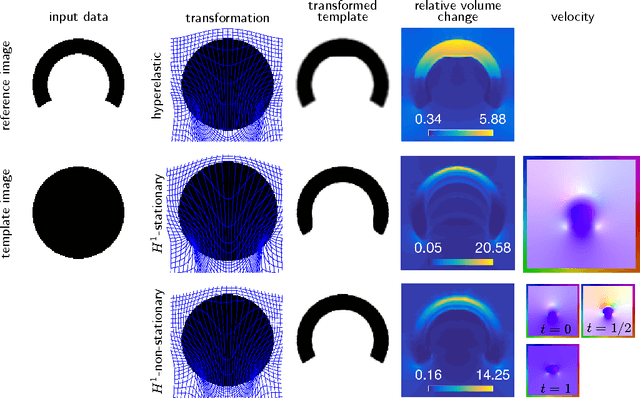

We present an efficient solver for diffeomorphic image registration problems in the framework of Large Deformations Diffeomorphic Metric Mappings (LDDMM). We use an optimal control formulation, in which the velocity field of a hyperbolic PDE needs to be found such that the distance between the final state of the system (the transformed/transported template image) and the observation (the reference image) is minimized. Our solver supports both stationary and non-stationary (i.e., transient or time-dependent) velocity fields. As transformation models, we consider both the transport equation (assuming intensities are preserved during the deformation) and the continuity equation (assuming mass-preservation). We consider the reduced form of the optimal control problem and solve the resulting unconstrained optimization problem using a discretize-then-optimize approach. A key contribution is the elimination of the PDE constraint using a Lagrangian hyperbolic PDE solver. Lagrangian methods rely on the concept of characteristic curves that we approximate here using a fourth-order Runge-Kutta method. We also present an efficient algorithm for computing the derivatives of final state of the system with respect to the velocity field. This allows us to use fast Gauss-Newton based methods. We present quickly converging iterative linear solvers using spectral preconditioners that render the overall optimization efficient and scalable. Our method is embedded into the image registration framework FAIR and, thus, supports the most commonly used similarity measures and regularization functionals. We demonstrate the potential of our new approach using several synthetic and real world test problems with up to 14.7 million degrees of freedom.