Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hysteretic Q-learning Coordination Framework for Emerging Mobility Systems in Smart Cities
Paper and Code
Nov 05, 2020
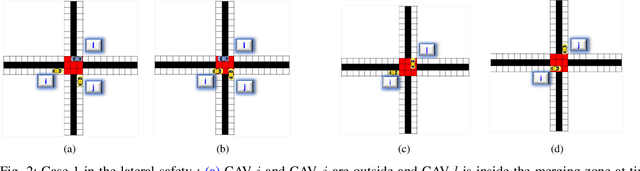
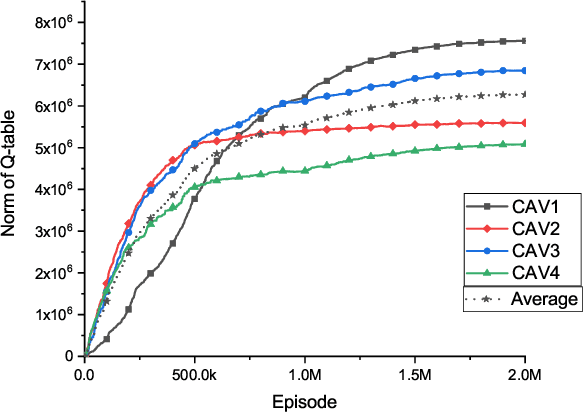

Connected and automated vehicles (CAVs) can alleviate traffic congestion, air pollution, and improve safety. In this paper, we provide a decentralized coordination framework for CAVs at a signal-free intersection to minimize travel time and improve fuel efficiency. We employ a simple yet powerful reinforcement learning approach, an off-policy temporal difference learning called Q-learning, enhanced with a coordination mechanism to address this problem. Then, we integrate a first-in-first-out queuing policy to improve the performance of our system. We demonstrate the efficacy of our proposed approach through simulation and comparison with the classical optimal control method based on Pontryagin's minimum principle.
* 8 pages, 5 figures, 2 tables
View paper on