 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid POMDP-BDI Agent Architecture with Online Stochastic Planning and Plan Caching
Paper and Code
Jul 03, 2016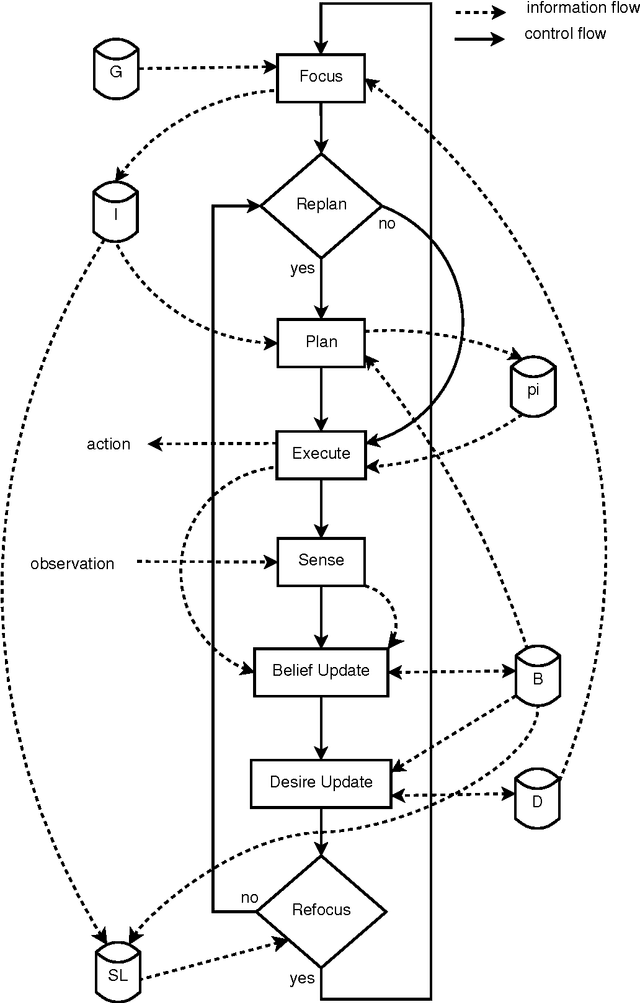
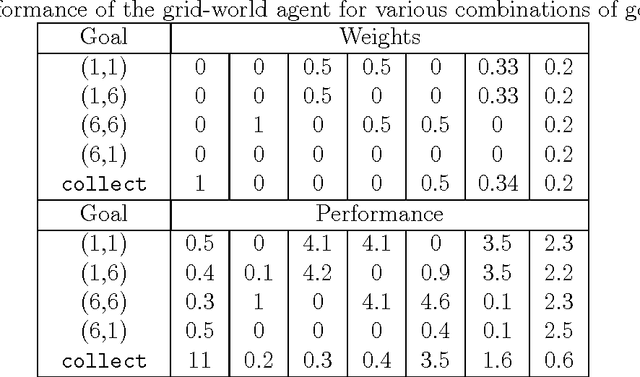


This article presents an agent architecture for controlling an autonomous agent in stochastic environments. The architecture combines the partially observable Markov decision process (POMDP) model with the belief-desire-intention (BDI) framework. The Hybrid POMDP-BDI agent architecture takes the best features from the two approaches, that is, the online generation of reward-maximizing courses of action from POMDP theory, and sophisticated multiple goal management from BDI theory. We introduce the advances made since the introduction of the basic architecture, including (i) the ability to pursue multiple goals simultaneously and (ii) a plan library for storing pre-written plans and for storing recently generated plans for future reuse. A version of the architecture without the plan library is implemented and is evaluated using simulations. The results of the simulation experiments indicate that the approach is feasible.