 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Framework to Generate Robust Biped Locomotion Based on Divergent Component of Motion
Paper and Code
Nov 18, 2019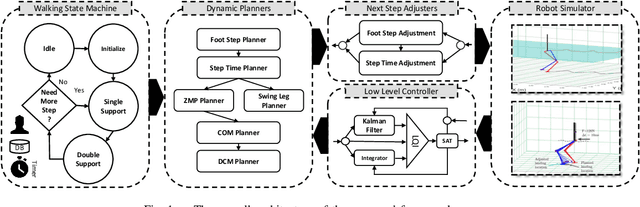

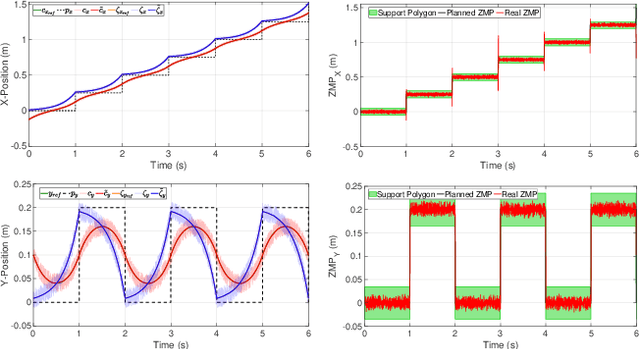
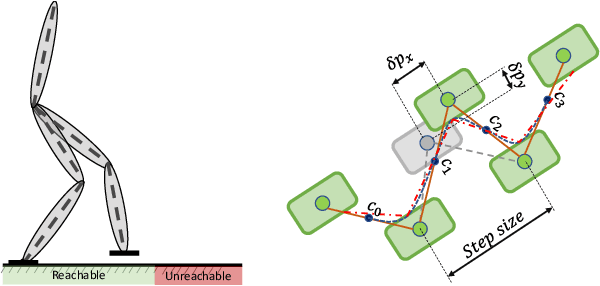
Keeping the stability can be counted as the essential ability of a humanoid robot to step out of the laboratory to work in our real environment. Since humanoid robots have similar kinematic to a human, humans expect these robots to be robustly capable of stabilizing even in a challenging situation like while a severe push is applied. This paper presents a robust walking framework which not only takes into account the traditional push recovery approaches (e.g., ankle, hip and step strategies) but also uses the concept of Divergent Component of the Motion (DCM) to adjust next step timing and location. The control core of the proposed framework is composed of a Linear-Quadratic-Gaussian (LQG) controller and two proportional controllers. In this framework, the LQG controller tries to track the reference trajectories and the proportional controllers are designed to adjust the next step timing and location that allow the robot to recover from a severe push. The robustness and the performance of the proposed framework have been validated by performing a set of simulations, including walking and push recovery using MATLAB. The simulation results verified that the proposed framework is capable of providing a robust walking even in very challenging situations.