 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Handheld Device for the In Situ Acquisition of Multimodal Tactile Sensing Data
Paper and Code
Nov 12, 2015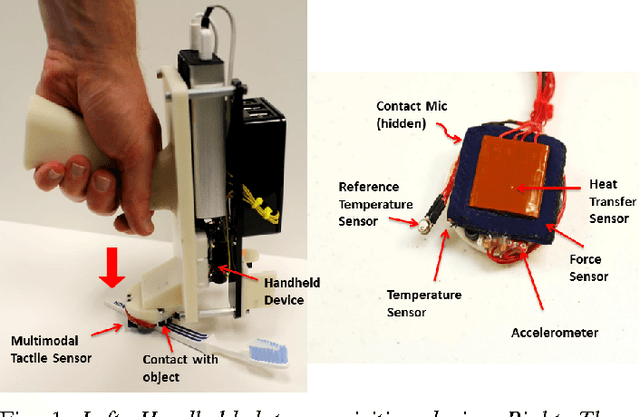
Multimodal tactile sensing could potentially enable robots to improve their performance at manipulation tasks by rapidly discriminating between task-relevant objects. Data-driven approaches to this tactile perception problem show promise, but there is a dearth of suitable training data. In this two-page paper, we present a portable handheld device for the efficient acquisition of multimodal tactile sensing data from objects in their natural settings, such as homes. The multimodal tactile sensor on the device integrates a fabric-based force sensor, a contact microphone, an accelerometer, temperature sensors, and a heating element. We briefly introduce our approach, describe the device, and demonstrate feasibility through an evaluation with a small data set that we captured by making contact with 7 task-relevant objects in a bathroom of a person's home.