 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Gradient-Aware Search Algorithm for Constrained Markov Decision Processes
Paper and Code
May 07, 2020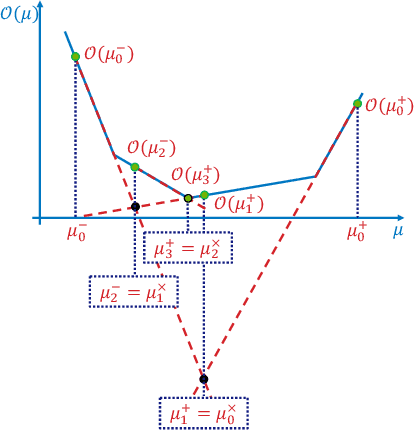
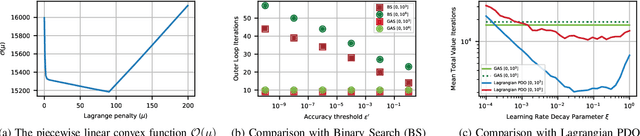

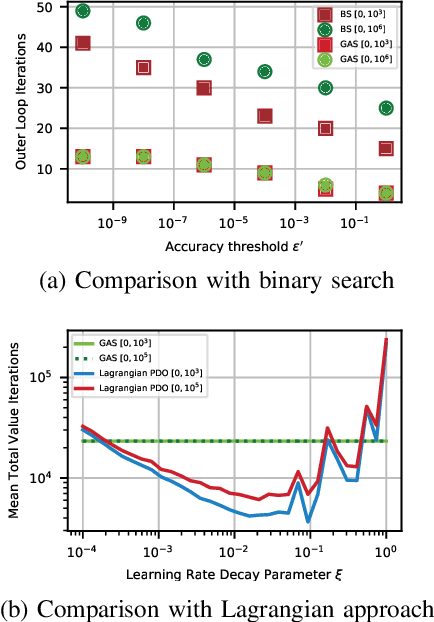
The canonical solution methodology for finite constrained Markov decision processes (CMDPs), where the objective is to maximize the expected infinite-horizon discounted rewards subject to the expected infinite-horizon discounted costs constraints, is based on convex linear programming. In this brief, we first prove that the optimization objective in the dual linear program of a finite CMDP is a piece-wise linear convex function (PWLC) with respect to the Lagrange penalty multipliers. Next, we propose a novel two-level Gradient-Aware Search (GAS) algorithm which exploits the PWLC structure to find the optimal state-value function and Lagrange penalty multipliers of a finite CMDP. The proposed algorithm is applied in two stochastic control problems with constraints: robot navigation in a grid world and solar-powered unmanned aerial vehicle (UAV)-based wireless network management. We empirically compare the convergence performance of the proposed GAS algorithm with binary search (BS), Lagrangian primal-dual optimization (PDO), and Linear Programming (LP). Compared with benchmark algorithms, it is shown that the proposed GAS algorithm converges to the optimal solution faster, does not require hyper-parameter tuning, and is not sensitive to initialization of the Lagrange penalty multiplier.