 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Robot Programming in Cobotic Environments: First user experiments
Paper and Code
Oct 19, 2018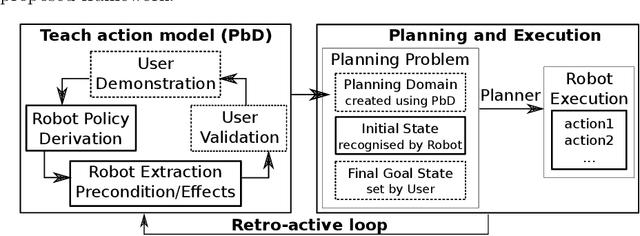
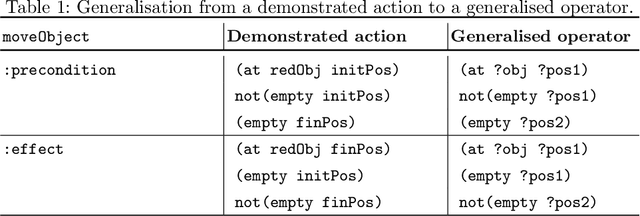
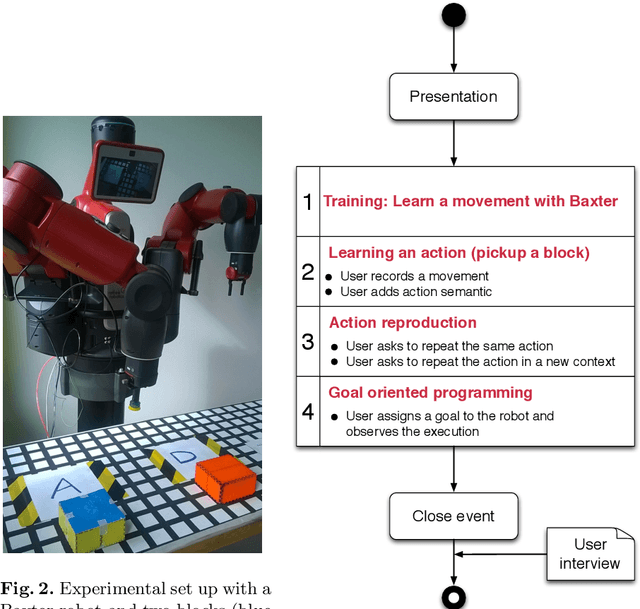
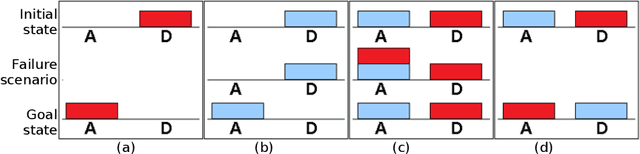
The increasing presence of robots in industries has not gone unnoticed. Large industrial players have incorporated them into their production lines, but smaller companies hesitate due to high initial costs and the lack of programming expertise. In this work we introduce a framework that combines two disciplines, Programming by Demonstration and Automated Planning, to allow users without any programming knowledge to program a robot. The user teaches the robot atomic actions together with their semantic meaning and represents them in terms of preconditions and effects. Using these atomic actions the robot can generate action sequences autonomously to reach any goal given by the user. We evaluated the usability of our framework in terms of user experiments with a Baxter Research Robot and showed that it is well-adapted to users without any programming experience.