 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for eVTOL Performance Evaluation in Urban Air Mobility Realm
Paper and Code
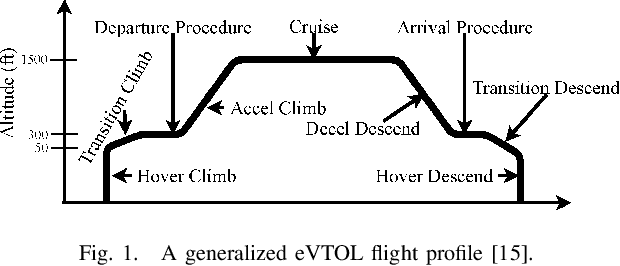
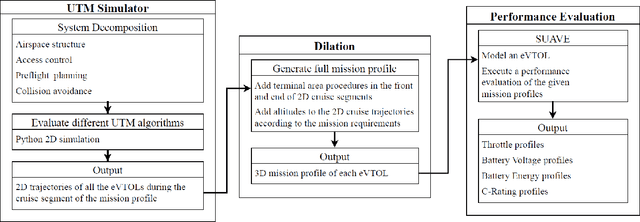
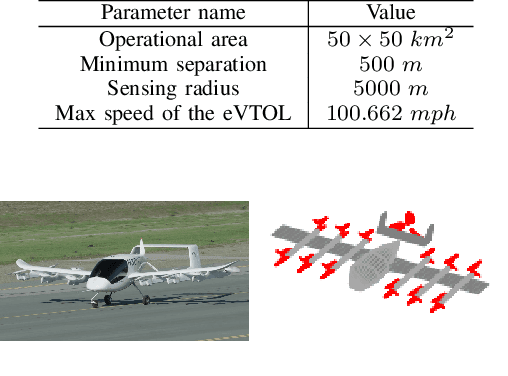
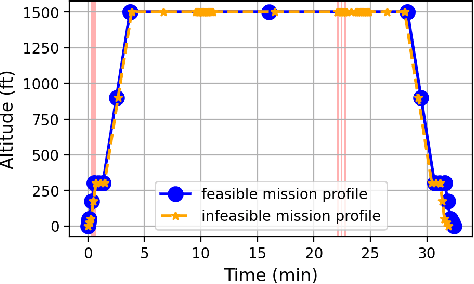
In this paper, we developed a generalized simulation framework for the evaluation of electric vertical takeoff and landing vehicles (eVTOLs) in the context of Unmanned Aircraft Systems (UAS) Traffic Management (UTM) and under the concept of Urban Air Mobility (UAM). Unlike most existing studies, the proposed framework combines the utilization of UTM and eVTOLs to develop a realistic UAM testing platform. For this purpose, we first enhanced an existing UTM simulator to simulate the real-world UAM environment. Then, instead of using a simplified eVOTL model, a realistic eVTOL design tool, namely SUAVE, is employed and an dilation sub-module is introduced to bridge the gap between the UTM simulator and SUAVE eVTOL performance evaluation tool to elaborate the complete mission profile. Based on the developed simulation framework, experiments are conducted and the results are presented to analyze the performance of eVTOLs in the UAM environment.