Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA First-Order Approach to Model Simultaneous Control of Multiple Microrobots
Paper and Code
Nov 05, 2021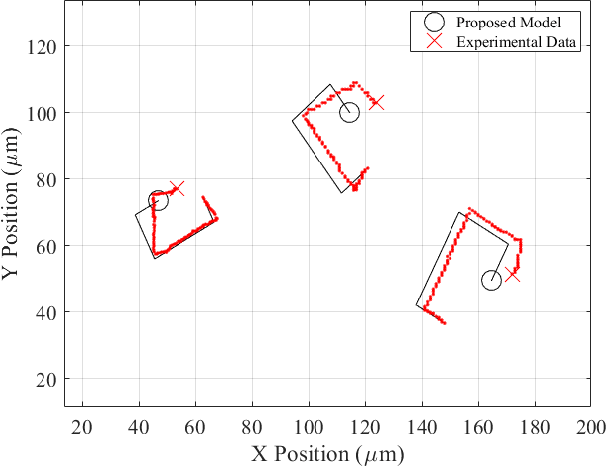
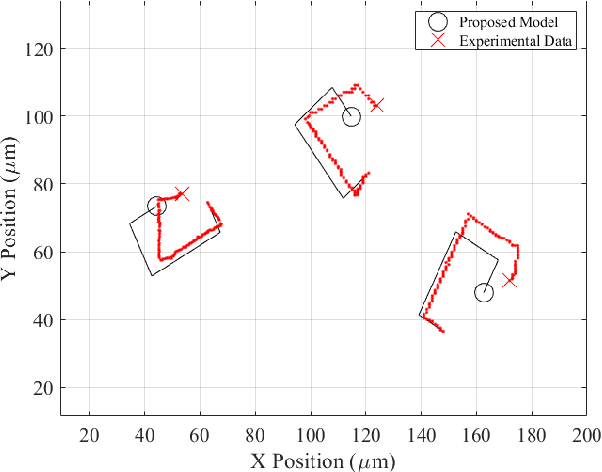

The control of swarm systems is relatively well understood for simple robotic platforms at the macro scale. However, there are still several unanswered questions about how similar results can be achieved for microrobots. In this paper, we propose a modeling framework based on a dynamic model of magnetized self-propelling Janus microrobots under a global magnetic field. We verify our model experimentally and provide methods that can aim at accurately describing the behavior of microrobots while modeling their simultaneous control. The model can be generalized to other microrobotic platforms in low Reynolds number environments.
* 7 pages, 2 figures
View paper on