 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Factor-Graph Approach for Optimization Problems with Dynamics Constraints
Paper and Code
Nov 11, 2020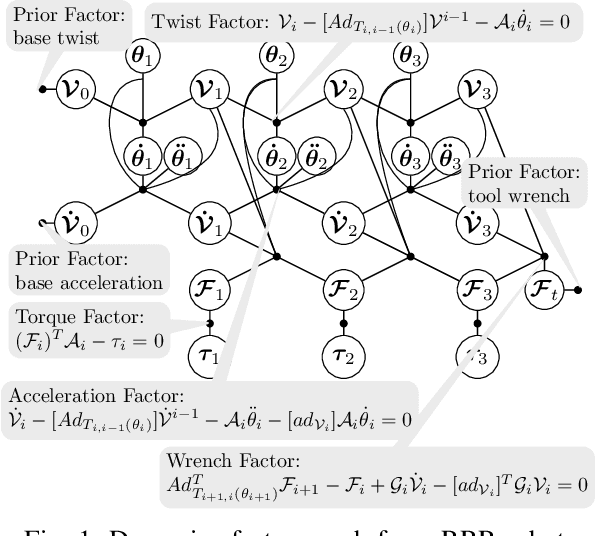
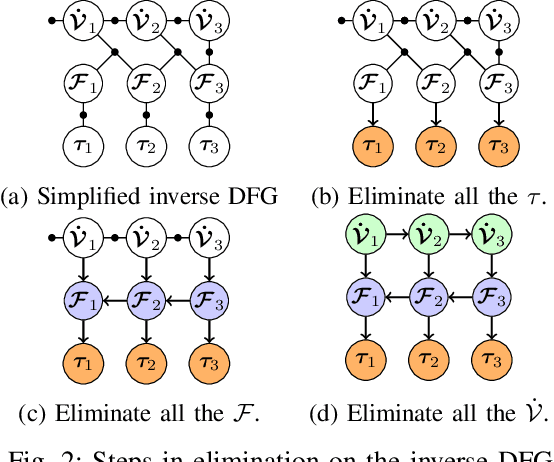
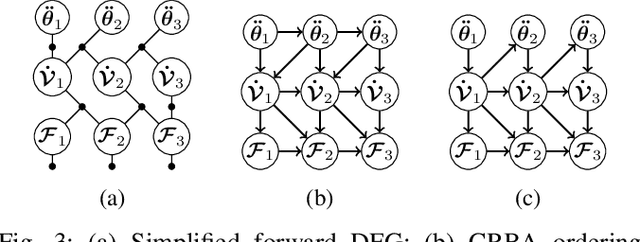
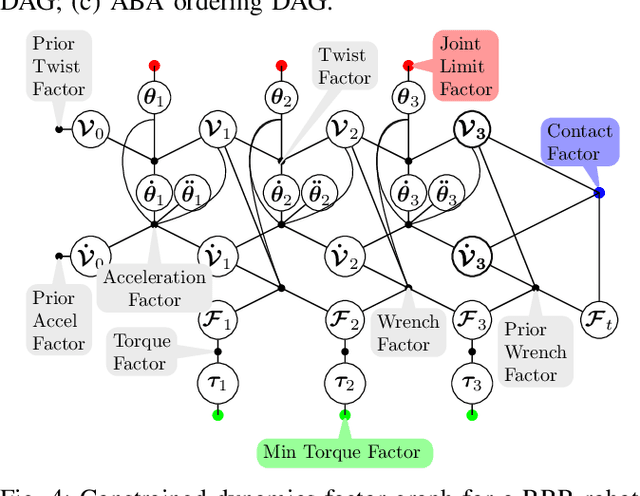
In this paper, we introduce dynamics factor graphs as a graphical framework to solve dynamics problems and kinodynamic motion planning problems with full consideration of whole-body dynamics and contacts. A factor graph representation of dynamics problems provides an insightful visualization of their mathematical structure and can be used in conjunction with sparse nonlinear optimizers to solve challenging, high-dimensional optimization problems in robotics. We can easily formulate kinodynamic motion planning as a trajectory optimization problem with factor graphs. We demonstrate the flexibility and descriptive power of dynamics factor graphs by applying them to control various dynamical systems, ranging from a simple cart pole to a 12-DoF quadrupedal robot.