Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Reinforcement Learning Approach to Audio-Based Navigation in a Multi-Speaker Environment
Paper and Code
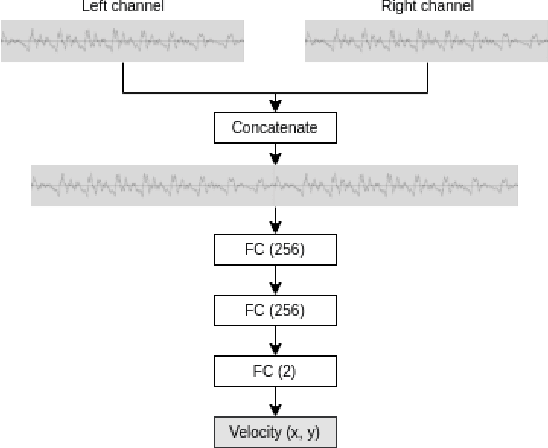
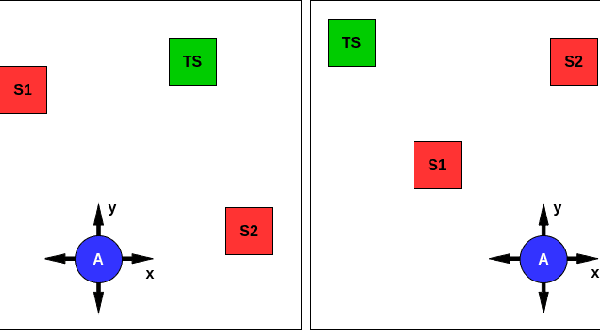
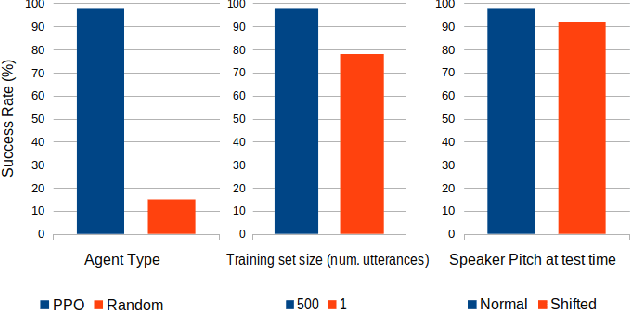
In this work we use deep reinforcement learning to create an autonomous agent that can navigate in a two-dimensional space using only raw auditory sensory information from the environment, a problem that has received very little attention in the reinforcement learning literature. Our experiments show that the agent can successfully identify a particular target speaker among a set of $N$ predefined speakers in a room and move itself towards that speaker, while avoiding collision with other speakers or going outside the room boundaries. The agent is shown to be robust to speaker pitch shifting and it can learn to navigate the environment, even when a limited number of training utterances are available for each speaker.
* To be published in ICASSP 2021
View paper on