 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA deep learning approach to real-time parking occupancy prediction in spatio-termporal networks incorporating multiple spatio-temporal data sources
Paper and Code
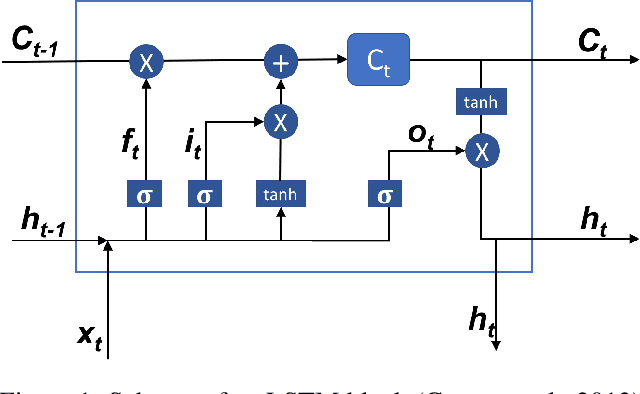
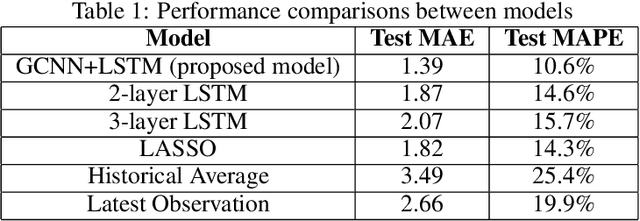
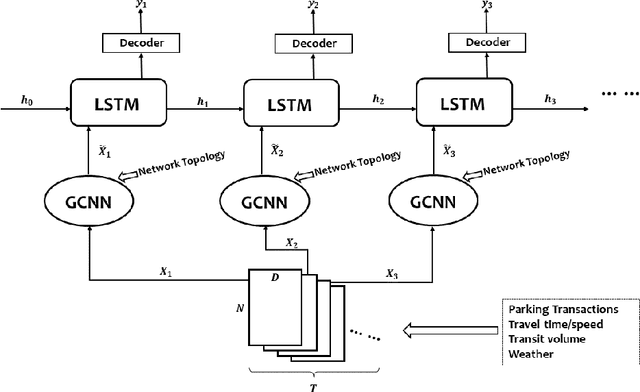
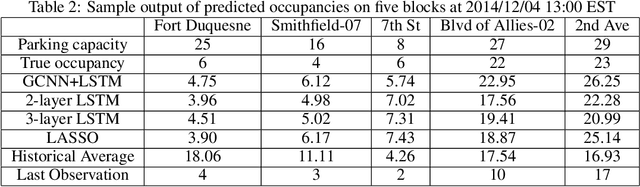
A deep learning model is proposed for predicting block-level parking occupancy in real time. The model leverages Graph-Convolutional Neural Networks (GCNN) to extract the spatial relations of traffic flow in large-scale networks, and utilizes Recurrent Neural Networks (RNN) with Long-Short Term Memory (LSTM) to capture the temporal features. In addition, the model is capable of taking multiple heterogeneously structured traffic data sources as input, such as parking meter transactions, traffic speed, and weather conditions. The model performance is evaluated through a case study in Pittsburgh downtown area. The proposed model outperforms other baseline methods including multi-layer LSTM and Lasso with an average testing MAPE of 12.0\% when predicting block-level parking occupancies 30 minutes in advance. The case study also shows that, in generally, the prediction model works better for business areas than for recreational locations. We found that incorporating traffic speed and weather information can significantly improve the prediction performance. Weather data is particularly useful for improving predicting accuracy in recreational areas.