 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Coordinated Search Strategy for Multiple Solitary Robots: An Extension
Paper and Code
May 25, 2019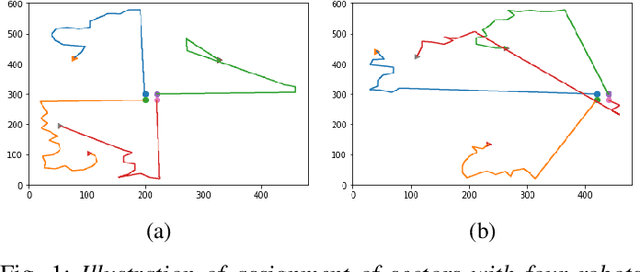
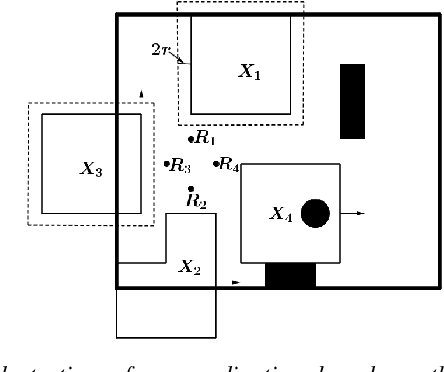
The problem of coordination without a priori information about the environment is important in robotics. Applications vary from formation control to search and rescue. This paper considers the problem of search by a group of solitary robots: self-interested robots without a priori knowledge about each other, and with restricted communication capacity. When the capacity of robots to communicate is limited, they may obliviously search in overlapping regions (i.e. be subject to interference). Interference hinders robot progress, and strategies have been proposed in the literature to mitigate interference [1], [2]. Interaction of solitary robots has attracted much interest in robotics, but the problem of mitigating interference when time for search is limited remains an important area of research. We propose a coordination strategy based on the method of cellular decomposition [3] where we employ the concept of soft obstacles: a robot considers cells assigned to other robots as obstacles. The performance of the proposed strategy is demonstrated by means of simulation experiments. Simulations indicate the utility of the strategy in situations where a known upper bound on the search time precludes search of the entire environment.