 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Control Method to Compensate Ground Level Changes for Running Bipedal Robots
Paper and Code
Jun 06, 2020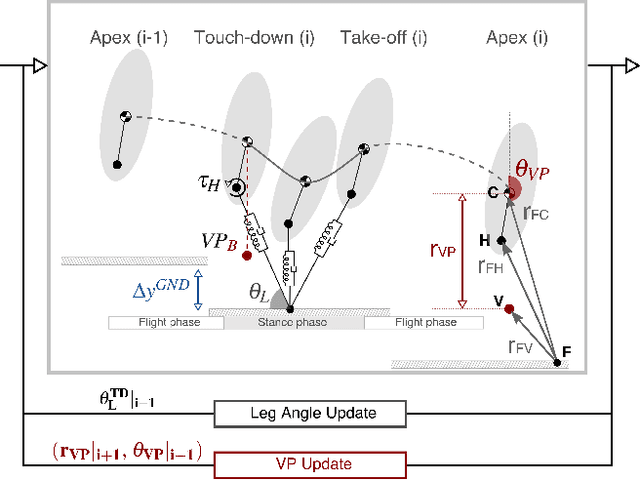
Bipedal running is a difficult task to realize in robots, since the trunk is underactuated and control is limited by intermittent ground contacts. Stabilizing the trunk becomes even more challenging if the terrain is uneven and causes perturbations. One bio-inspired method to achieve postural stability is the virtual point (VP) control, which is able to generate natural motion. However, so far it has only been studied for level running. In this work, we investigate whether the VP control method can accommodate single step-downs and downhill terrains. We provide guidelines on the model and controller parameterizations for handling varying terrain conditions. Next, we show that the VP method is able to stabilize single step-down perturbations up to 40 cm, and downhill grades up to 20-10{\deg} corresponding to running speeds of 2-5m/s. Our results suggest that VP control is a promising candidate for terrain-adaptive running control of bipedal robots.