 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA comparative evaluation of machine learning methods for robot navigation through human crowds
Paper and Code
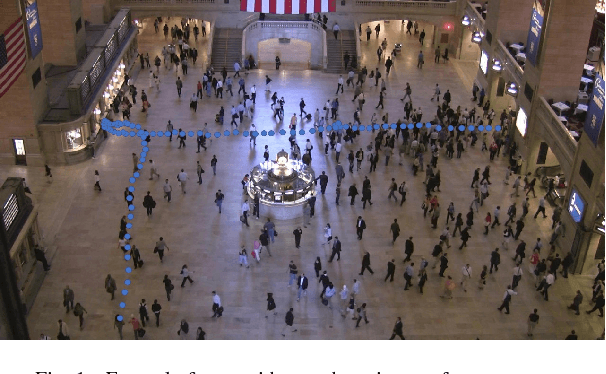
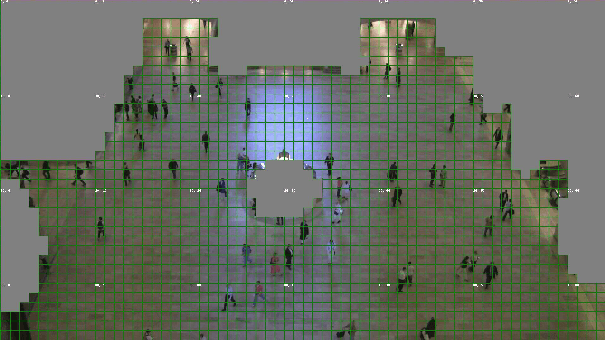
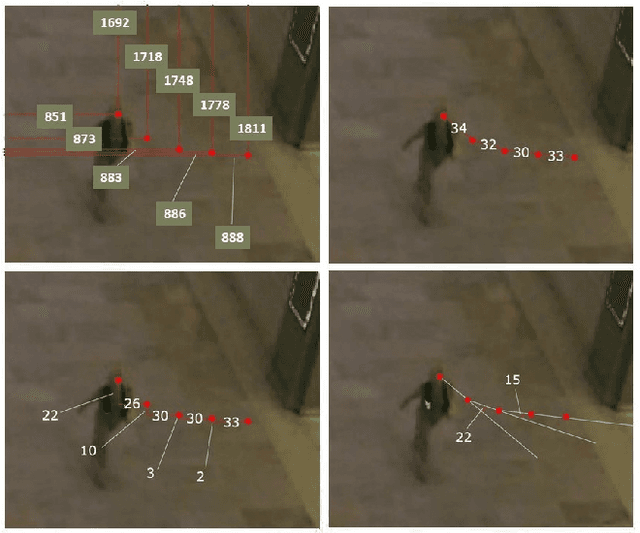
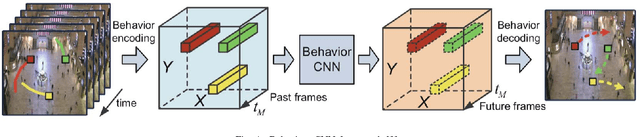
Robot navigation through crowds poses a difficult challenge to AI systems, since the methods should result in fast and efficient movement but at the same time are not allowed to compromise safety. Most approaches to date were focused on the combination of pathfinding algorithms with machine learning for pedestrian walking prediction. More recently, reinforcement learning techniques have been proposed in the research literature. In this paper, we perform a comparative evaluation of pathfinding/prediction and reinforcement learning approaches on a crowd movement dataset collected from surveillance videos taken at Grand Central Station in New York. The results demonstrate the strong superiority of state-of-the-art reinforcement learning approaches over pathfinding with state-of-the-art behaviour prediction techniques.