 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Certified-Complete Bimanual Manipulation Planner
Paper and Code
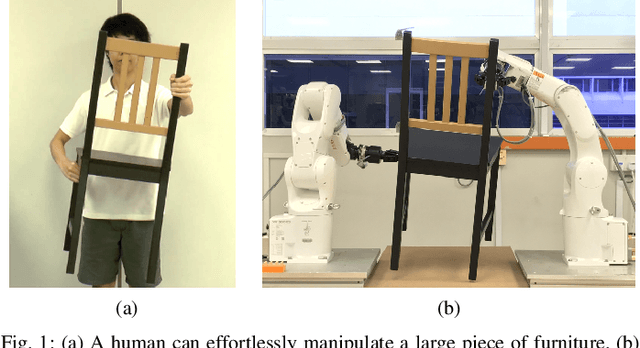
Planning motions for two robot arms to move an object collaboratively is a difficult problem, mainly because of the closed-chain constraint, which arises whenever two robot hands simultaneously grasp a single rigid object. In this paper, we propose a manipulation planning algorithm to bring an object from an initial stable placement (position and orientation of the object on the support surface) towards a goal stable placement. The key specificity of our algorithm is that it is certified-complete: for a given object and a given environment, we provide a certificate that the algorithm will find a solution to any bimanual manipulation query in that environment whenever one exists. Moreover, the certificate is constructive: at run-time, it can be used to quickly find a solution to a given query. The algorithm is tested in software and hardware on a number of large pieces of furniture.