 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Case Study of Image Enhancement Algorithms' Effectiveness of Improving Neural Networks' Performance on Adverse Images
Paper and Code
Dec 18, 2023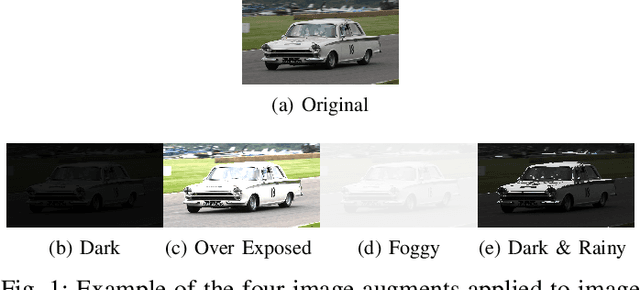
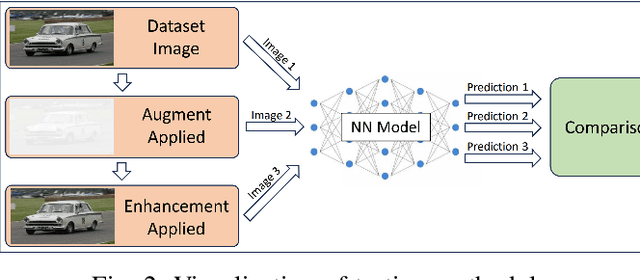

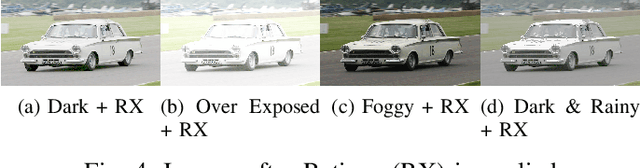
Neural Networks (NNs) have become indispensable for applications of Computer Vision (CV) and their use has been ever-growing. NNs are commonly trained for long periods of time on datasets like ImageNet and COCO that have been carefully created to represent common "real-world" environments. When deployed in the field, such as applications of autonomous vehicles, NNs can encounter adverse scenarios that degrade performance. Using image enhancements algorithms to enhance images before being inferenced on a NN model poses an intriguing alternative to retraining, however, published literature on the effectiveness of this solution is scarce. To fill this knowledge gap, we provide a case study on two popular image enhancement algorithms, Histogram Equalization (HE) and Retinex (RX). We simulate four types of adverse scenarios an autonomous vehicle could encounter, dark, over exposed, foggy, and dark & rainy weather conditions. We evaluate the effectiveness of HE and RX using several well established models:, Resnet, GoogleLeNet, YOLO, and a Vision Transformer.