 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA BP Method for Track-Before-Detect
Paper and Code
Jul 03, 2023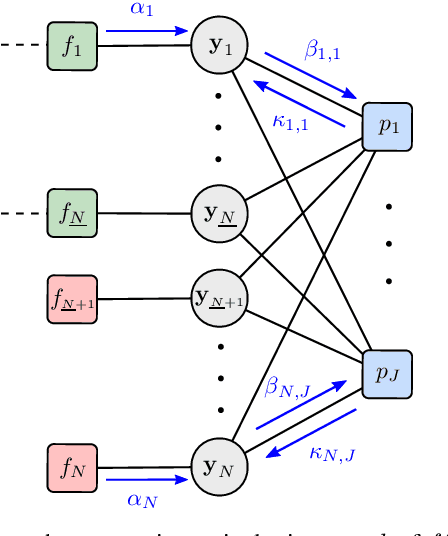
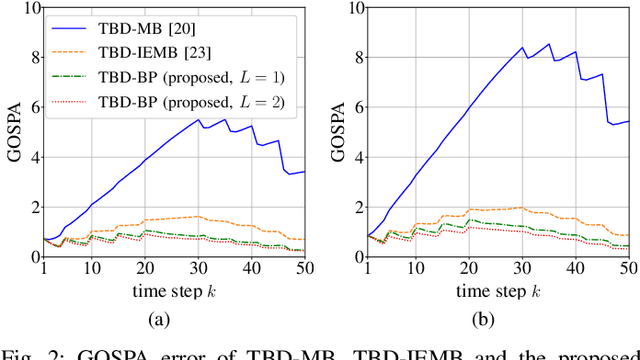
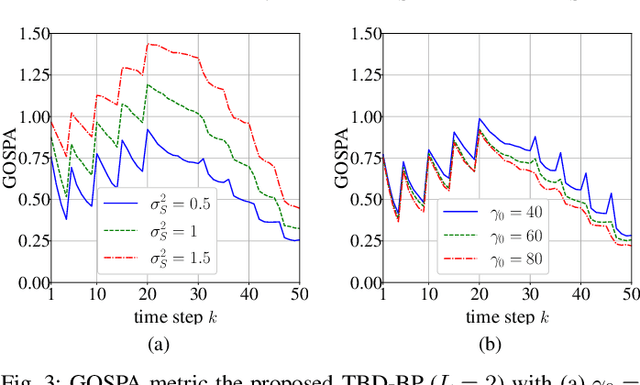
Tracking an unknown number of low-observable objects is notoriously challenging. This letter proposes a sequential Bayesian estimation method based on the track-before-detect (TBD) approach. In TBD, raw sensor measurements are directly used by the tracking algorithm without any preprocessing. Our proposed method is based on a new statistical model that introduces a new object hypothesis for each data cell of the raw sensor measurements. It allows objects to interact and contribute to more than one data cell. Based on the factor graph representing our statistical model, we derive the message passing equations of the proposed belief propagation (BP) method for TBD. Approximations are applied to certain BP messages to reduce computational complexity and improve scalability. In a simulation experiment, our proposed BP-based TBD method outperforms two other state-of-the-art TBD methods.