 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Voxel Maps to 2D Occupancy Maps for Efficient Path Planning for Aerial and Ground Robots
Paper and Code
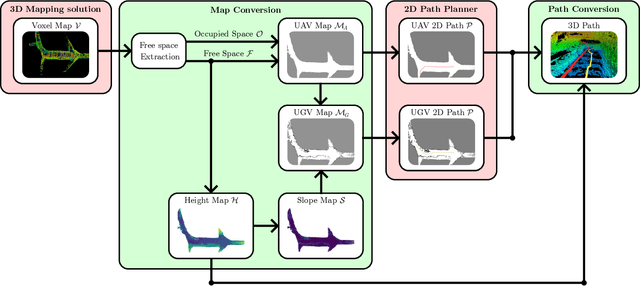
This article introduces a novel method for converting 3D voxel maps, commonly utilized by robots for localization and navigation, into 2D occupancy maps that can be used for more computationally efficient large-scale navigation, both in the sense of computation time and memory usage. The main aim is to effectively integrate the distinct mapping advantages of 2D and 3D maps to enable efficient path planning for both unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs). The proposed method uses the free space representation in the UFOMap mapping solution to generate 2D occupancy maps with height and slope information. In the process of 3D to 2D map conversion, the proposed method conducts safety checks and eliminates free spaces in the map with dimensions (in the height axis) lower than the robot's safety margins. This allows an aerial or ground robot to navigate safely, relying primarily on the 2D map generated by the method. Additionally, the method extracts height and slope data from the 3D voxel map. The slope data identifies areas too steep for a ground robot to traverse, marking them as occupied, thus enabling a more accurate representation of the terrain for ground robots. The height data is utilized to convert paths generated using the 2D map into paths in 3D space for both UAVs and UGVs. The effectiveness of the proposed method is evaluated in two different environments.