Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D-Rotation-Equivariant Quaternion Neural Networks
Paper and Code
Nov 20, 2019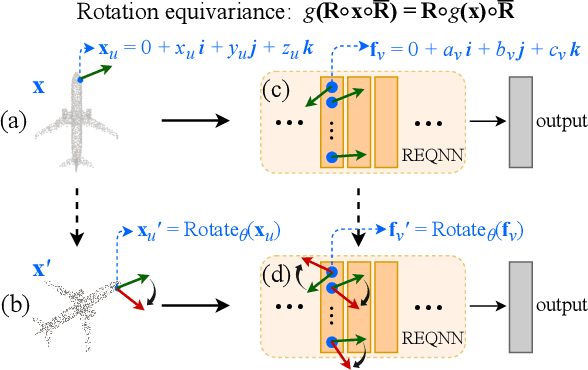
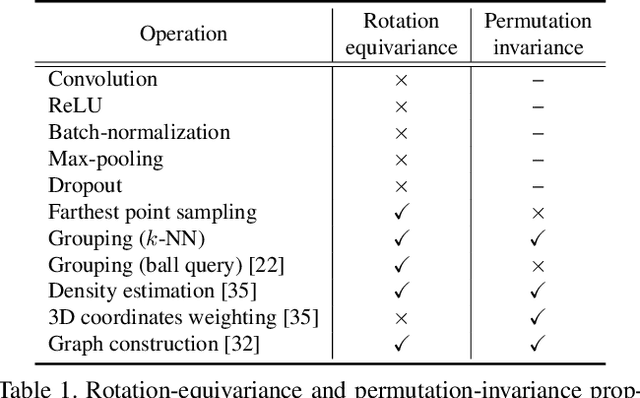
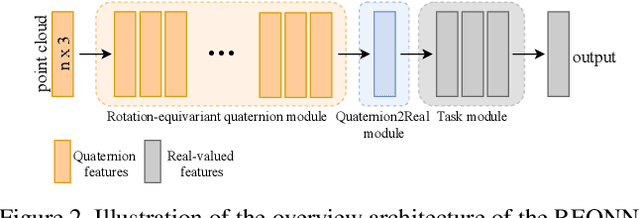
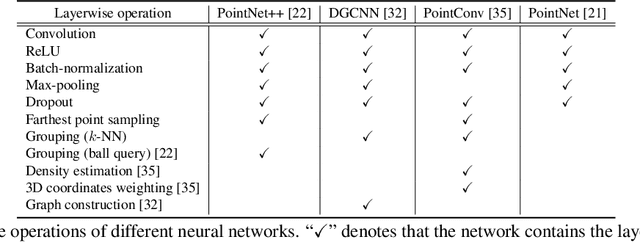
This paper proposes a set of rules to revise various neural networks for 3D point cloud processing to rotation-equivariant quaternion neural networks (REQNNs). We find that when a neural network uses quaternion features under certain conditions, the network feature naturally has the rotation-equivariance property. Rotation equivariance means that applying a specific rotation transformation to the input point cloud is equivalent to applying the same rotation transformation to all intermediate-layer quaternion features. Besides, the REQNN also ensures that the intermediate-layer features are invariant to the permutation of input points. Compared with the original neural network, the REQNN exhibits higher rotation robustness.
View paper on