Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2nd Place Solution for SODA10M Challenge 2021 -- Continual Detection Track
Paper and Code
Oct 25, 2021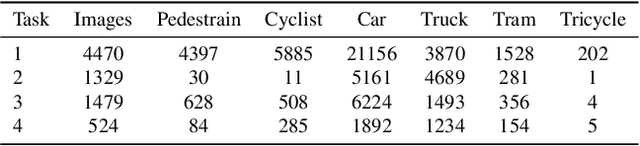
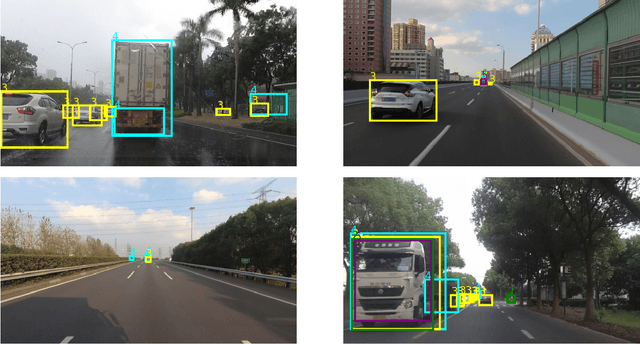
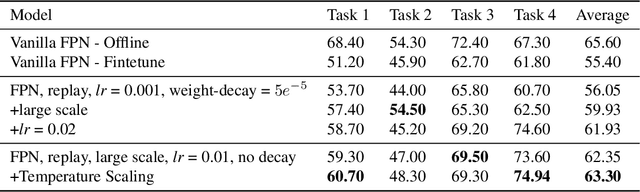
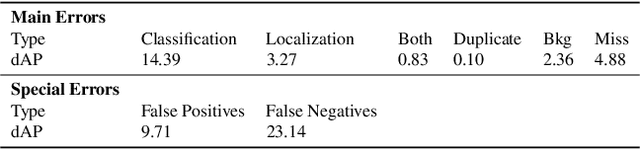
In this technical report, we present our approaches for the continual object detection track of the SODA10M challenge. We adapt ResNet50-FPN as the baseline and try several improvements for the final submission model. We find that task-specific replay scheme, learning rate scheduling, model calibration, and using original image scale helps to improve performance for both large and small objects in images. Our team `hypertune28' secured the second position among 52 participants in the challenge. This work will be presented at the ICCV 2021 Workshop on Self-supervised Learning for Next-Generation Industry-level Autonomous Driving (SSLAD).
* Published in SSLAD workshop at ICCV 2021
View paper on