 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2D3D-MatchNet: Learning to Match Keypoints Across 2D Image and 3D Point Cloud
Paper and Code
Apr 22, 2019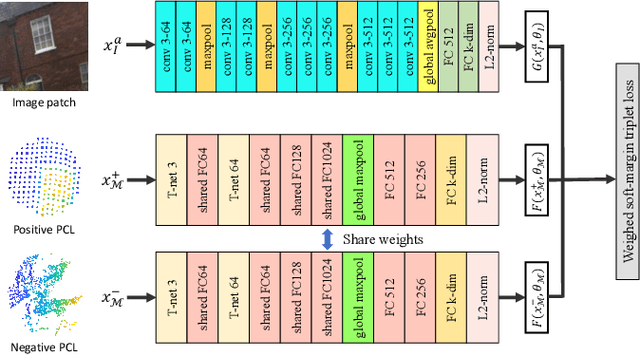
Large-scale point cloud generated from 3D sensors is more accurate than its image-based counterpart. However, it is seldom used in visual pose estimation due to the difficulty in obtaining 2D-3D image to point cloud correspondences. In this paper, we propose the 2D3D-MatchNet - an end-to-end deep network architecture to jointly learn the descriptors for 2D and 3D keypoint from image and point cloud, respectively. As a result, we are able to directly match and establish 2D-3D correspondences from the query image and 3D point cloud reference map for visual pose estimation. We create our Oxford 2D-3D Patches dataset from the Oxford Robotcar dataset with the ground truth camera poses and 2D-3D image to point cloud correspondences for training and testing the deep network. Experimental results verify the feasibility of our approach.