 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Minimal Cost Algorithm for Off-Line Diagnosability of Discrete Event Systems
Apr 11, 2007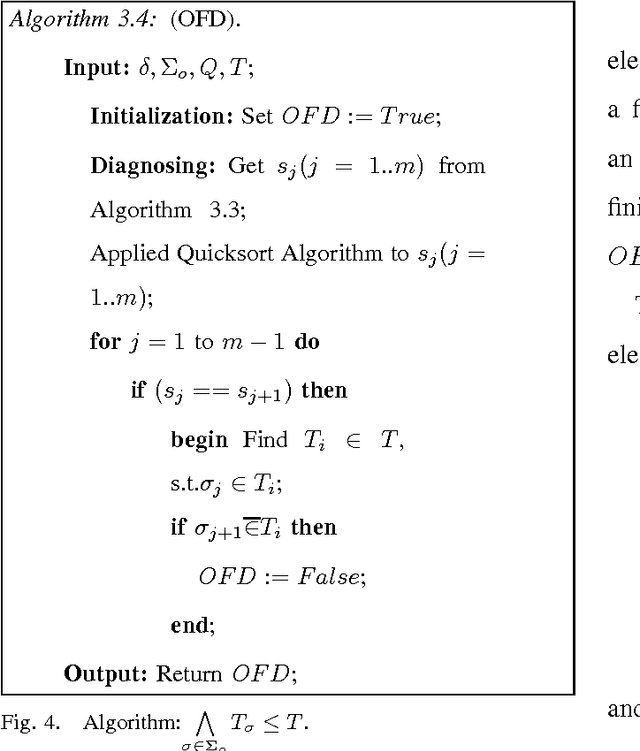
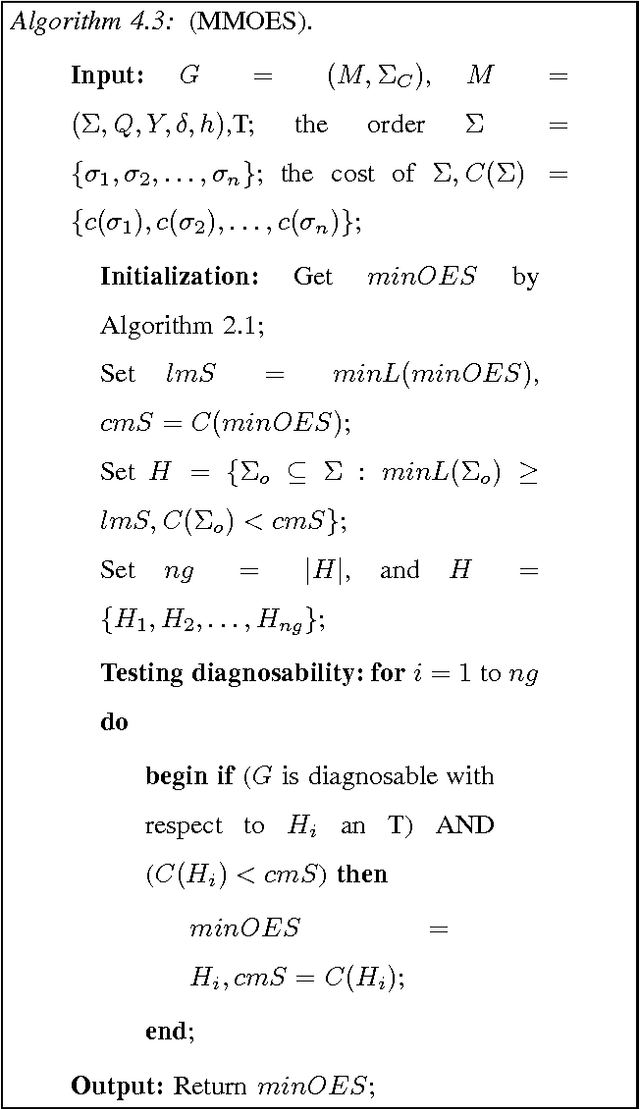
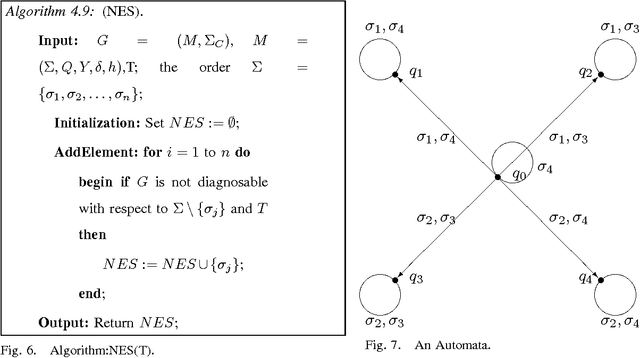
The failure diagnosis for {\it discrete event systems} (DESs) has been given considerable attention in recent years. Both on-line and off-line diagnostics in the framework of DESs was first considered by Lin Feng in 1994, and particularly an algorithm for diagnosability of DESs was presented. Motivated by some existing problems to be overcome in previous work, in this paper, we investigate the minimal cost algorithm for diagnosability of DESs. More specifically: (i) we give a generic method for judging a system's off-line diagnosability, and the complexity of this algorithm is polynomial-time; (ii) and in particular, we present an algorithm of how to search for the minimal set in all observable event sets, whereas the previous algorithm may find {\it non-minimal} one.
Diagnosability of Fuzzy Discrete Event Systems
Dec 18, 2006In order to more effectively cope with the real-world problems of vagueness, {\it fuzzy discrete event systems} (FDESs) were proposed recently, and the supervisory control theory of FDESs was developed. In view of the importance of failure diagnosis, in this paper, we present an approach of the failure diagnosis in the framework of FDESs. More specifically: (1) We formalize the definition of diagnosability for FDESs, in which the observable set and failure set of events are {\it fuzzy}, that is, each event has certain degree to be observable and unobservable, and, also, each event may possess different possibility of failure occurring. (2) Through the construction of observability-based diagnosers of FDESs, we investigate its some basic properties. In particular, we present a necessary and sufficient condition for diagnosability of FDESs. (3) Some examples serving to illuminate the applications of the diagnosability of FDESs are described. To conclude, some related issues are raised for further consideration.
Decentralized Failure Diagnosis of Stochastic Discrete Event Systems
Oct 30, 2006
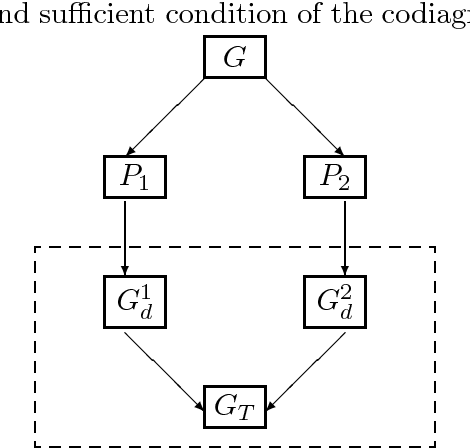
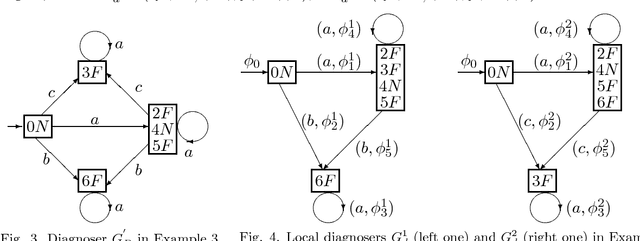
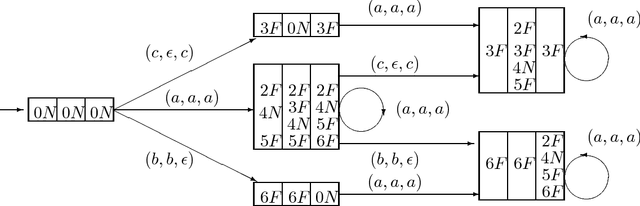
Recently, the diagnosability of {\it stochastic discrete event systems} (SDESs) was investigated in the literature, and, the failure diagnosis considered was {\it centralized}. In this paper, we propose an approach to {\it decentralized} failure diagnosis of SDESs, where the stochastic system uses multiple local diagnosers to detect failures and each local diagnoser possesses its own information. In a way, the centralized failure diagnosis of SDESs can be viewed as a special case of the decentralized failure diagnosis presented in this paper with only one projection. The main contributions are as follows: (1) We formalize the notion of codiagnosability for stochastic automata, which means that a failure can be detected by at least one local stochastic diagnoser within a finite delay. (2) We construct a codiagnoser from a given stochastic automaton with multiple projections, and the codiagnoser associated with the local diagnosers is used to test codiagnosability condition of SDESs. (3) We deal with a number of basic properties of the codiagnoser. In particular, a necessary and sufficient condition for the codiagnosability of SDESs is presented. (4) We give a computing method in detail to check whether codiagnosability is violated. And (5) some examples are described to illustrate the applications of the codiagnosability and its computing method.
* 25 pages. Comments and criticisms are welcome