 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Interpretable Flight's 4D Landing Parameters Using Tunnel Gaussian Process
Nov 18, 2020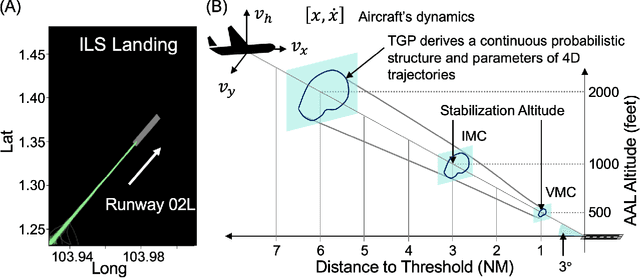


Approach and landing accidents (ALAs) have resulted in a significant number of hull losses worldwide, aside from runway excursion, hard landing, landing short. Technologies (e.g., instrument landing system) and procedures (e.g., stabilized approach criteria) have been developed to reduce ALA risks. In this paper, we propose a data-driven method to learn and interpret flight's 4D approach and landing parameters to facilitate comprehensible and actionable insights of landing dynamics for aircrew and air traffic controller (ATCO) in real-time. Specifically, we develop a tunnel Gaussian process (TGP) model to gain an insight into the landing dynamics of aircraft using advanced surface movement guidance and control system (A-SMGCS) data, which then indicates the stability of flight. TGP hybridizes the strengths of sparse variational Gaussian process and polar Gaussian process to learn from a large amount of data in cylindrical coordinates. We examine TGP qualitatively and quantitatively by synthesizing two complex trajectory datasets. Empirically, TGP reconstructed the structure of the synthesized trajectories. When applied to operational A-SMGCS data, TGP provides the probabilistic description of landing dynamics and interpretable 4D tunnel views of approach and landing parameters. The 4D tunnel views can facilitate the analysis of procedure adherence and augment existing aircrew and ATCO's display during the approach and landing procedures, enabling necessary corrective actions. The proposed TGP model can also provide insights and aid the design of landing procedures in complex runway configurations such as parallel approach. Moreover, the extension of TGP model to the next generation of landing systems (e.g., GNSS landing system) is straight-forward. The interactive visualization of our findings are available at https://simkuangoh.github.io/TunnelGP/.