 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpolationSLAM: A Novel Robust Visual SLAM System in Rotational Motion
Oct 22, 2021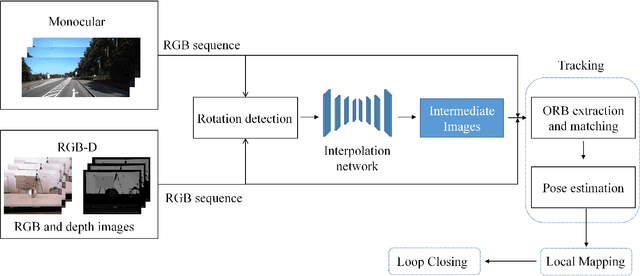
In recent years, visual SLAM has achieved great progress and development in different scenes, however, there are still many problems to be solved. The SLAM system is not only restricted by the external scenes but is also affected by its movement mode, such as movement speed, rotational motion, etc. As the representatives of the most excellent networks for frame interpolation, Sepconv-slomo and EDSC can predict high-quality intermediate frame between the previous frame and the current frame. Intuitively, frame interpolation technology can enrich the information of images sequences, the number of which is limited by the camera's frame rate, and thus decreasing the probability of SLAM system's failure rate. In this article, we propose an InterpolationSLAM framework. InterpolationSLAM is robust in rotational movement for Monocular and RGB-D configurations. By detecting the rotation and performing interpolation processing at the rotated position, pose of the system can be estimated more accurately, thereby improving the accuracy and robustness of the SLAM system in the rotational movement.
InterpolationSLAM: A Novel Robust Visual SLAM System in Rotating Scenes
Oct 06, 2021



In recent years, visual SLAM has achieved great progress and development, but in complex scenes, especially rotating scenes, the error of mapping will increase significantly, and the slam system is easy to lose track. In this article, we propose an InterpolationSLAM framework, which is a visual SLAM framework based on ORB-SLAM2. InterpolationSLAM is robust in rotating scenes for Monocular and RGB-D configurations. By detecting the rotation and performing interpolation processing at the rotated position, pose of the system can be estimated more accurately at the rotated position, thereby improving the accuracy and robustness of the SLAM system in the rotating scenes. To the best of our knowledge, it is the first work combining the interpolation network into a Visual SLAM system to improve SLAM system robustness in rotating scenes. We conduct experiments both on KITTI Monocular and TUM RGB-D datasets. The results demonstrate that InterpolationSLAM outperforms the accuracy of standard Visual SLAM baselines.