 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-zero-sum Game Control for Multi-vehicle Driving via Reinforcement Learning
Feb 08, 2023
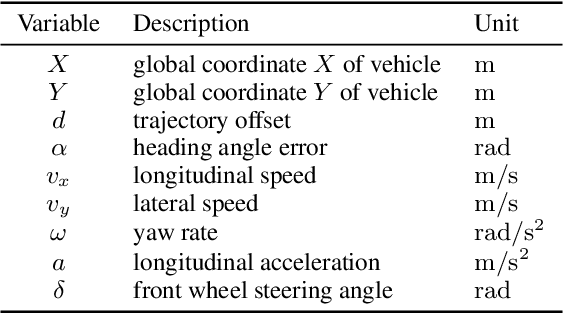

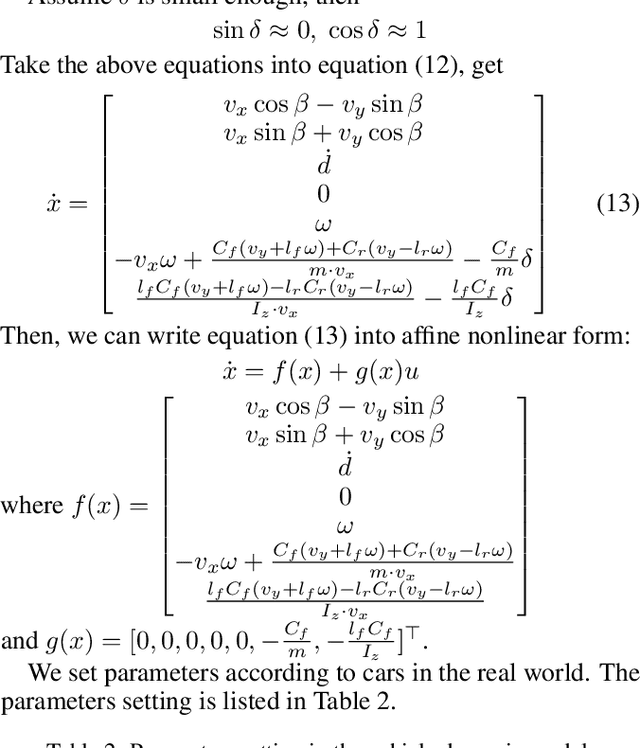
When a vehicle drives on the road, its behaviors will be affected by surrounding vehicles. Prediction and decision should not be considered as two separate stages because all vehicles make decisions interactively. This paper constructs the multi-vehicle driving scenario as a non-zero-sum game and proposes a novel game control framework, which consider prediction, decision and control as a whole. The mutual influence of interactions between vehicles is considered in this framework because decisions are made by Nash equilibrium strategy. To efficiently obtain the strategy, ADP, a model-based reinforcement learning method, is used to solve coupled Hamilton-Jacobi-Bellman equations. Driving performance is evaluated by tracking, efficiency, safety and comfort indices. Experiments show that our algorithm could drive perfectly by directly controlling acceleration and steering angle. Vehicles could learn interactive behaviors such as overtaking and pass. In summary, we propose a non-zero-sum game framework for modeling multi-vehicle driving, provide an effective way to solve the Nash equilibrium driving strategy, and validate at non-signalized intersections.
Laziness, Barren Plateau, and Noise in Machine Learning
Jun 19, 2022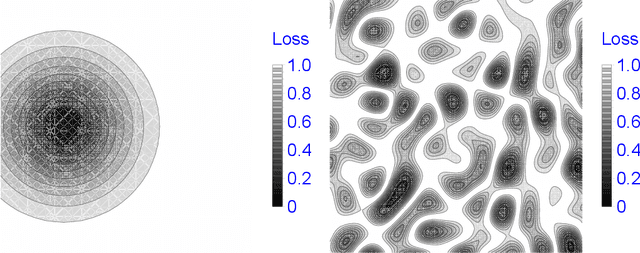
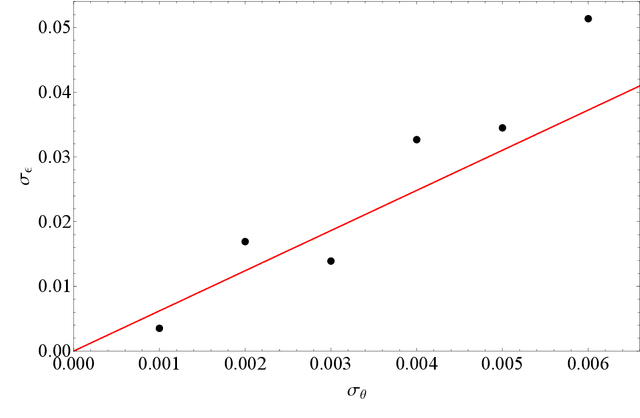
We define \emph{laziness} to describe a large suppression of variational parameter updates for neural networks, classical or quantum. In the quantum case, the suppression is exponential in the number of qubits for randomized variational quantum circuits. We discuss the difference between laziness and \emph{barren plateau} in quantum machine learning created by quantum physicists in \cite{mcclean2018barren} for the flatness of the loss function landscape during gradient descent. We address a novel theoretical understanding of those two phenomena in light of the theory of neural tangent kernels. For noiseless quantum circuits, without the measurement noise, the loss function landscape is complicated in the overparametrized regime with a large number of trainable variational angles. Instead, around a random starting point in optimization, there are large numbers of local minima that are good enough and could minimize the mean square loss function, where we still have quantum laziness, but we do not have barren plateaus. However, the complicated landscape is not visible within a limited number of iterations, and low precision in quantum control and quantum sensing. Moreover, we look at the effect of noises during optimization by assuming intuitive noise models, and show that variational quantum algorithms are noise-resilient in the overparametrization regime. Our work precisely reformulates the quantum barren plateau statement towards a precision statement and justifies the statement in certain noise models, injects new hope toward near-term variational quantum algorithms, and provides theoretical connections toward classical machine learning. Our paper provides conceptual perspectives about quantum barren plateaus, together with discussions about the gradient descent dynamics in \cite{together}.