 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved Anonymous Multi-Agent Path Finding Algorithm
Dec 26, 2023



We consider an Anonymous Multi-Agent Path-Finding (AMAPF) problem where the set of agents is confined to a graph, a set of goal vertices is given and each of these vertices has to be reached by some agent. The problem is to find an assignment of the goals to the agents as well as the collision-free paths, and we are interested in finding the solution with the optimal makespan. A well-established approach to solve this problem is to reduce it to a special type of a graph search problem, i.e. to the problem of finding a maximum flow on an auxiliary graph induced by the input one. The size of the former graph may be very large and the search on it may become a bottleneck. To this end, we suggest a specific search algorithm that leverages the idea of exploring the search space not through considering separate search states but rather bulks of them simultaneously. That is, we implicitly compress, store and expand bulks of the search states as single states, which results in high reduction in runtime and memory. Empirically, the resultant AMAPF solver demonstrates superior performance compared to the state-of-the-art competitor and is able to solve all publicly available MAPF instances from the well-known MovingAI benchmark in less than 30 seconds.
Safe Interval Path Planning With Kinodynamic Constraints
Feb 01, 2023Safe Interval Path Planning (SIPP) is a powerful algorithm for solving single-agent pathfinding problem when the agent is confined to a graph and certain vertices/edges of this graph are blocked at certain time intervals due to dynamic obstacles that populate the environment. Original SIPP algorithm relies on the assumption that the agent is able to stop instantaneously. However, this assumption often does not hold in practice, e.g. a mobile robot moving with a cruising speed is not able to stop immediately but rather requires gradual deceleration to a full stop that takes time. In other words, the robot is subject to kinodynamic constraints. Unfortunately, as we show in this work, in such a case original SIPP is incomplete. To this end, we introduce a novel variant of SIPP that is provably complete and optimal for planning with acceleration/deceleration. In the experimental evaluation we show that the key property of the original SIPP still holds for the modified version -- it performs much less expansions compared to A* and, as a result, is notably faster.
Prioritized SIPP for Multi-Agent Path Finding With Kinematic Constraints
Aug 11, 2021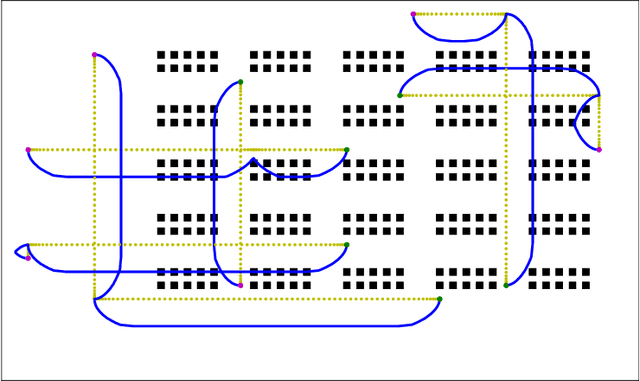
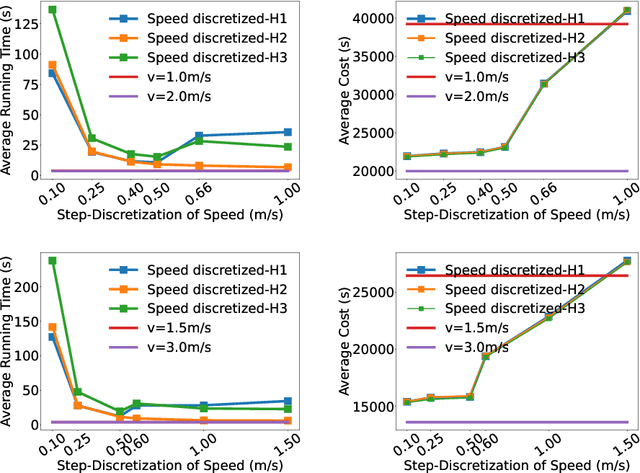
Multi-Agent Path Finding (MAPF) is a long-standing problem in Robotics and Artificial Intelligence in which one needs to find a set of collision-free paths for a group of mobile agents (robots) operating in the shared workspace. Due to its importance, the problem is well-studied and multiple optimal and approximate algorithms are known. However, many of them abstract away from the kinematic constraints and assume that the agents can accelerate/decelerate instantaneously. This complicates the application of the algorithms on the real robots. In this paper, we present a method that mitigates this issue to a certain extent. The suggested solver is essentially, a prioritized planner based on the well-known Safe Interval Path Planning (SIPP) algorithm. Within SIPP we explicitly reason about the speed and the acceleration thus the constructed plans directly take kinematic constraints of agents into account. We suggest a range of heuristic functions for that setting and conduct a thorough empirical evaluation of the suggested algorithm.