 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Temporal Decorrelation of State Estimates
Oct 02, 2024Many commercial and defense applications involve multisensor, multitarget tracking, requiring the fusion of information from a set of sensors. An interesting use case occurs when data available at a central node (due to geometric diversity or retrodiction) allows for the tailoring of state estimation for a target. For instance, if a target is initially tracked with a maneuvering target filter, yet the target is clearly not maneuvering in retrospect, it would be beneficial at the fusion node to refilter that data with a non-maneuvering target filter. If measurements can be shared to the central node, the refiltering process can be accomplished by simply passing source measurements through an updated state estimation process. It is often the case for large, distributed systems, however, that only track information can be passed to a fusion center. In this circumstance, refiltering data becomes less straightforward as track states are linearly dependent across time, and the correlation needs to be properly accounted for before/during refiltering. In this work, a model-based temporal decorrelation process for state estimates with process noise will be studied. A decorrelation procedure will be presented based on a linear algebraic formulation of the problem, and process noise estimates will be created that ensure a conservative system state estimate. Numerical examples will be given to demonstrate the efficacy of the proposed algorithm.
Differentiable Point Scattering Models for Efficient Radar Target Characterization
Jun 05, 2022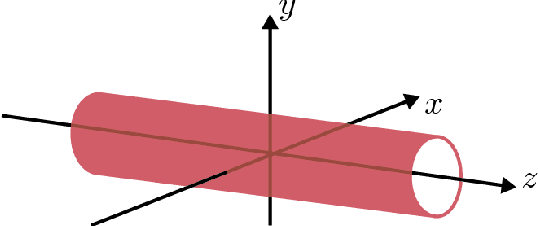
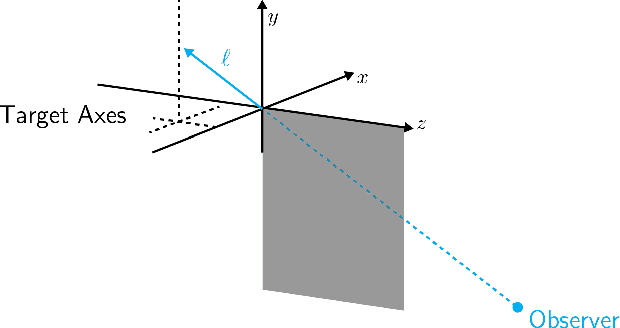
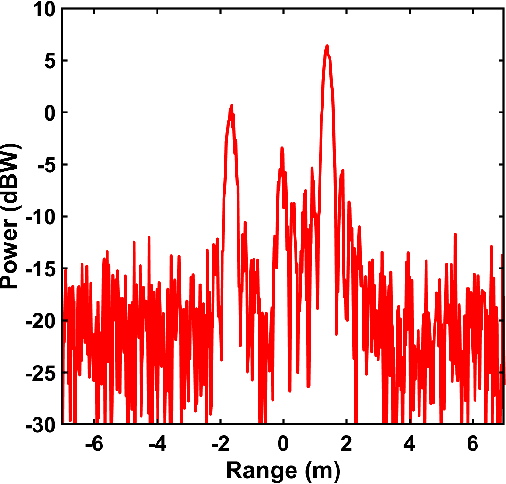
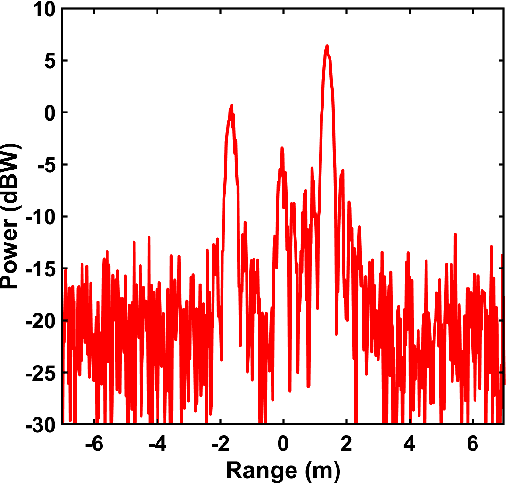
Target characterization is an important step in many defense missions, often relying on fitting a known target model to observed data. Optimization of model parameters can be computationally expensive depending on the model complexity, thus having models that both describe the data well and that can be efficiently optimized is critical. This work introduces a class of radar models that can be used to represent the radar scattering response of a target at high frequencies while also enabling the use of gradient-based optimization.