 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRELAX: Reinforcement Learning Enabled 2D-LiDAR Autonomous System for Parsimonious UAVs
Sep 15, 2023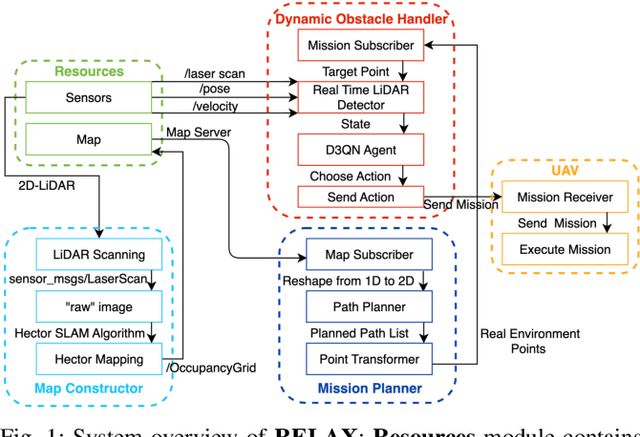
Unmanned Aerial Vehicles (UAVs) have gained significant prominence in recent years for areas including surveillance, search, rescue, and package delivery. One key aspect in UAV operations shared across all these tasks is the autonomous path planning, which enables UAV to navigate through complex, unknown, and dynamic environments while avoiding obstacles without human control. Despite countless efforts having been devoted to this subject, new challenges are constantly arisen due to the persistent trade-off between performance and cost. And new studies are more urgently needed to develop autonomous system for UAVs with parsimonious sensor setup, which is a major need for wider adoptions. To this end, we propose an end-to-end autonomous framework to enable UAVs with only one single 2D-LiDAR sensor to operate in unknown dynamic environments. More specifically, we break our approach into three stages: a pre-processing Map Constructor; an offline Mission Planner; and an online reinforcement learning (RL)-based Dynamic Obstacle Handler. Experiments show that our approach provides robust and reliable dynamic path planning and obstacle avoidance with only 1/10 of the cost in sensor configuration. The code will be made public upon acceptance.