 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Planning with Asynchronous Execution with Local Navigation for Multi-agent Pickup and Delivery Problem
Feb 18, 2023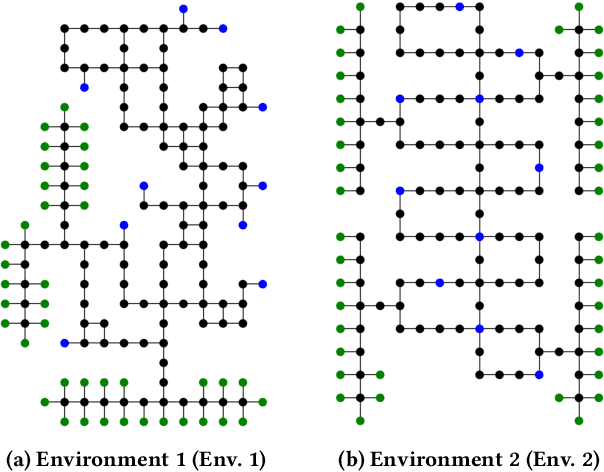



We propose a distributed planning method with asynchronous execution for multi-agent pickup and delivery (MAPD) problems for environments with occasional delays in agents' activities and flexible endpoints. MAPD is a crucial problem framework with many applications; however, most existing studies assume ideal agent behaviors and environments, such as a fixed speed of agents, synchronized movements, and a well-designed environment with many short detours for multiple agents to perform tasks easily. However, such an environment is often infeasible; for example, the moving speed of agents may be affected by weather and floor conditions and is often prone to delays. The proposed method can relax some infeasible conditions to apply MAPD in more realistic environments by allowing fluctuated speed in agents' actions and flexible working locations (endpoints). Our experiments showed that our method enables agents to perform MAPD in such an environment efficiently, compared to the baseline methods. We also analyzed the behaviors of agents using our method and discuss the limitations.
Deadlock-Free Method for Multi-Agent Pickup and Delivery Problem Using Priority Inheritance with Temporary Priority
May 25, 2022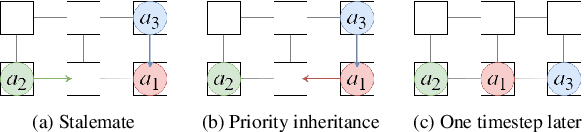

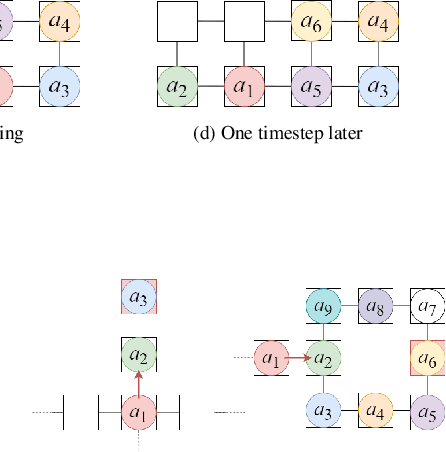
This paper proposes a control method for the multi-agent pickup and delivery problem (MAPD problem) by extending the priority inheritance with backtracking (PIBT) method to make it applicable to more general environments. PIBT is an effective algorithm that introduces a priority to each agent, and at each timestep, the agents, in descending order of priority, decide their next neighboring locations in the next timestep through communications only with the local agents. Unfortunately, PIBT is only applicable to environments that are modeled as a bi-connected area, and if it contains dead-ends, such as tree-shaped paths, PIBT may cause deadlocks. However, in the real-world environment, there are many dead-end paths to locations such as the shelves where materials are stored as well as loading/unloading locations to transportation trucks. Our proposed method enables MAPD tasks to be performed in environments with some tree-shaped paths without deadlock while preserving the PIBT feature; it does this by allowing the agents to have temporary priorities and restricting agents' movements in the trees. First, we demonstrate that agents can always reach their delivery without deadlock. Our experiments indicate that the proposed method is very efficient, even in environments where PIBT is not applicable, by comparing them with those obtained using the well-known token passing method as a baseline.
Standby-Based Deadlock Avoidance Method for Multi-Agent Pickup and Delivery Tasks
Jan 19, 2022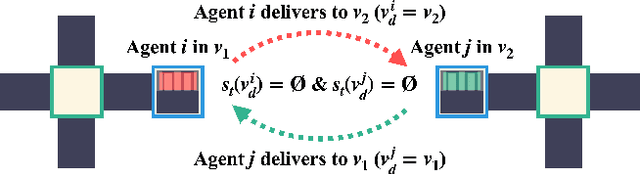
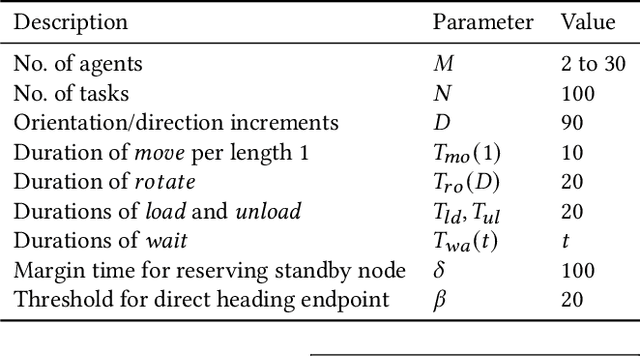

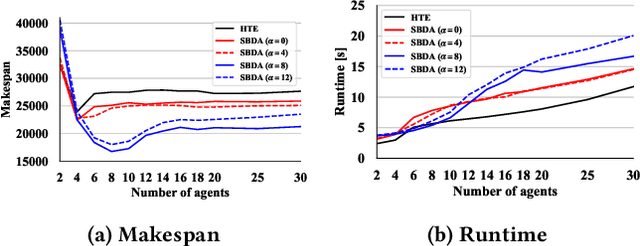
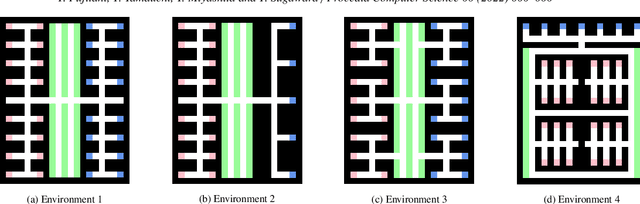
The multi-agent pickup and delivery (MAPD) problem, in which multiple agents iteratively carry materials without collisions, has received significant attention. However, many conventional MAPD algorithms assume a specifically designed grid-like environment, such as an automated warehouse. Therefore, they have many pickup and delivery locations where agents can stay for a lengthy period, as well as plentiful detours to avoid collisions owing to the freedom of movement in a grid. By contrast, because a maze-like environment such as a search-and-rescue or construction site has fewer pickup/delivery locations and their numbers may be unbalanced, many agents concentrate on such locations resulting in inefficient operations, often becoming stuck or deadlocked. Thus, to improve the transportation efficiency even in a maze-like restricted environment, we propose a deadlock avoidance method, called standby-based deadlock avoidance (SBDA). SBDA uses standby nodes determined in real-time using the articulation-point-finding algorithm, and the agent is guaranteed to stay there for a finite amount of time. We demonstrated that our proposed method outperforms a conventional approach. We also analyzed how the parameters used for selecting standby nodes affect the performance.