 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisible and Near Infrared Image Fusion Based on Texture Information
Jul 22, 2022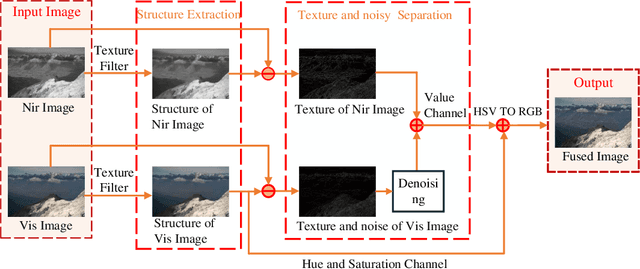
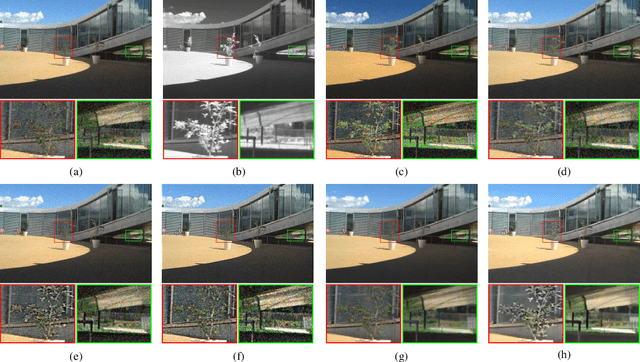
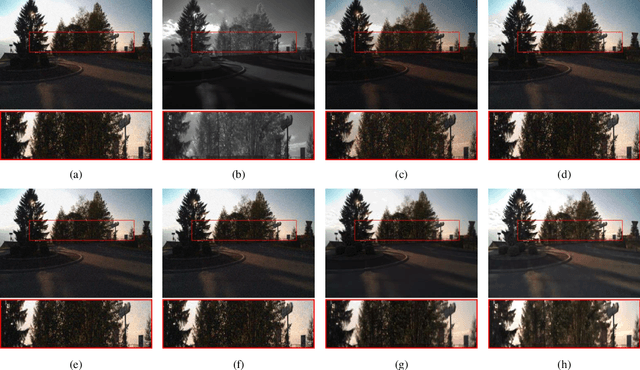

Multi-sensor fusion is widely used in the environment perception system of the autonomous vehicle. It solves the interference caused by environmental changes and makes the whole driving system safer and more reliable. In this paper, a novel visible and near-infrared fusion method based on texture information is proposed to enhance unstructured environmental images. It aims at the problems of artifact, information loss and noise in traditional visible and near infrared image fusion methods. Firstly, the structure information of the visible image (RGB) and the near infrared image (NIR) after texture removal is obtained by relative total variation (RTV) calculation as the base layer of the fused image; secondly, a Bayesian classification model is established to calculate the noise weight and the noise information and the noise information in the visible image is adaptively filtered by joint bilateral filter; finally, the fused image is acquired by color space conversion. The experimental results demonstrate that the proposed algorithm can preserve the spectral characteristics and the unique information of visible and near-infrared images without artifacts and color distortion, and has good robustness as well as preserving the unique texture.