 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Semantic-Geometric Approach for Clutter-Resistant Floorplan Generation from Building Point Clouds
May 15, 2023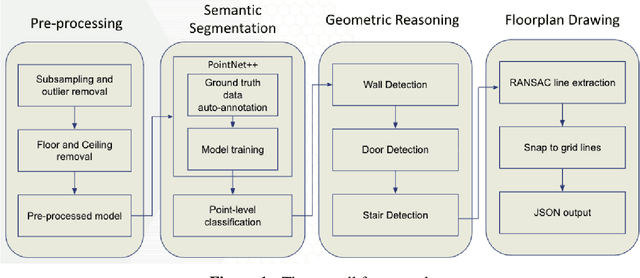


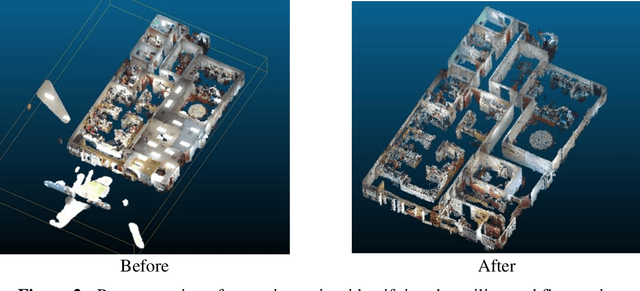
Building Information Modeling (BIM) technology is a key component of modern construction engineering and project management workflows. As-is BIM models that represent the spatial reality of a project site can offer crucial information to stakeholders for construction progress monitoring, error checking, and building maintenance purposes. Geometric methods for automatically converting raw scan data into BIM models (Scan-to-BIM) often fail to make use of higher-level semantic information in the data. Whereas, semantic segmentation methods only output labels at the point level without creating object level models that is necessary for BIM. To address these issues, this research proposes a hybrid semantic-geometric approach for clutter-resistant floorplan generation from laser-scanned building point clouds. The input point clouds are first pre-processed by normalizing the coordinate system and removing outliers. Then, a semantic segmentation network based on PointNet++ is used to label each point as ceiling, floor, wall, door, stair, and clutter. The clutter points are removed whereas the wall, door, and stair points are used for 2D floorplan generation. A region-growing segmentation algorithm paired with geometric reasoning rules is applied to group the points together into individual building elements. Finally, a 2-fold Random Sample Consensus (RANSAC) algorithm is applied to parameterize the building elements into 2D lines which are used to create the output floorplan. The proposed method is evaluated using the metrics of precision, recall, Intersection-over-Union (IOU), Betti error, and warping error.