 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupled Video Frame Interpolation and Encoding with Hybrid Event Cameras for Low-Power High-Framerate Video
Mar 28, 2025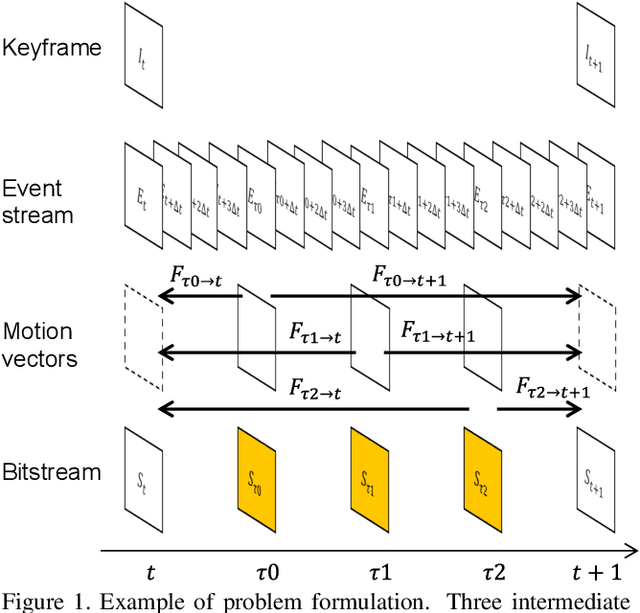
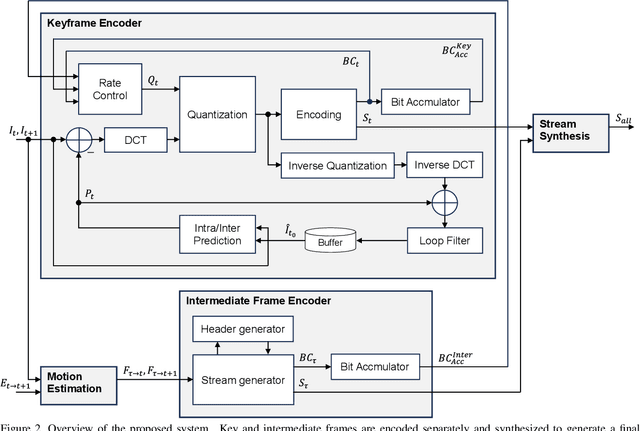
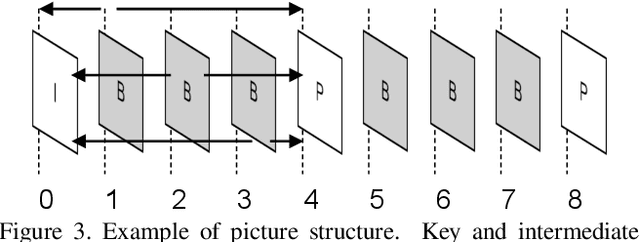
Every generation of mobile devices strives to capture video at higher resolution and frame rate than previous ones. This quality increase also requires additional power and computation to capture and encode high-quality media. We propose a method to reduce the overall power consumption for capturing high-quality videos in mobile devices. Using video frame interpolation (VFI), sensors can be driven at lower frame rate, which reduces sensor power consumption. With modern RGB hybrid event-based vision sensors (EVS), event data can be used to guide the interpolation, leading to results of much higher quality. If applied naively, interpolation methods can be expensive and lead to large amounts of intermediate data before video is encoded. This paper proposes a video encoder that generates a bitstream for high frame rate video without explicit interpolation. The proposed method estimates encoded video data (notably motion vectors) rather than frames. Thus, an encoded video file can be produced directly without explicitly producing intermediate frames.
Linking Vision and Multi-Agent Communication through Visible Light Communication using Event Cameras
Feb 15, 2024Various robots, rovers, drones, and other agents of mass-produced products are expected to encounter scenes where they intersect and collaborate in the near future. In such multi-agent systems, individual identification and communication play crucial roles. In this paper, we explore camera-based visible light communication using event cameras to tackle this problem. An event camera captures the events occurring in regions with changes in brightness and can be utilized as a receiver for visible light communication, leveraging its high temporal resolution. Generally, agents with identical appearances in mass-produced products are visually indistinguishable when using conventional CMOS cameras. Therefore, linking visual information with information acquired through conventional radio communication is challenging. We empirically demonstrate the advantages of a visible light communication system employing event cameras and LEDs for visual individual identification over conventional CMOS cameras with ArUco marker recognition. In the simulation, we also verified scenarios where our event camera-based visible light communication outperforms conventional radio communication in situations with visually indistinguishable multi-agents. Finally, our newly implemented multi-agent system verifies its functionality through physical robot experiments.