 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBIDCD - Bosch Industrial Depth Completion Dataset
Aug 10, 2021

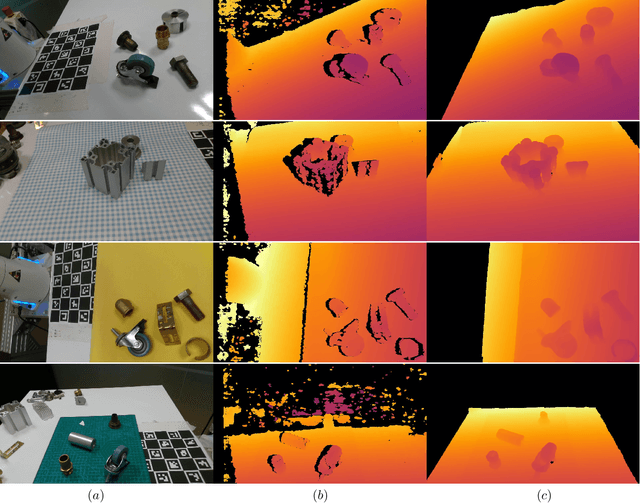
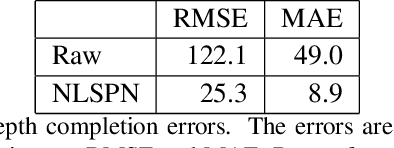
We introduce BIDCD - the Bosch Industrial Depth Completion Dataset. BIDCD is a new RGBD dataset of metallic industrial objects, collected with a depth camera mounted on a robotic manipulator. The main purpose of this dataset is to facilitate the training of domain-specific depth completion models, to be used in logistics and manufacturing tasks. We trained a State-of-the-Art depth completion model on this dataset, and report the results, setting an initial benchmark.
Depth Completion with RGB Prior
Aug 18, 2020


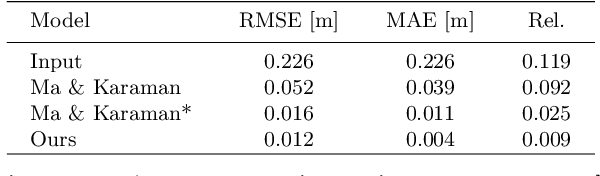
Depth cameras are a prominent perception system for robotics, especially when operating in natural unstructured environments. Industrial applications, however, typically involve reflective objects under harsh lighting conditions, a challenging scenario for depth cameras, as it induces numerous reflections and deflections, leading to loss of robustness and deteriorated accuracy. Here, we developed a deep model to correct the depth channel in RGBD images, aiming to restore the depth information to the required accuracy. To train the model, we created a novel industrial dataset that we now present to the public. The data was collected with low-end depth cameras and the ground truth depth was generated by multi-view fusion.