 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanding-Induced Viscoelastic Changes in an Anthropomimetic Foot Joint Structure are Modulated by Foot Structure and Posture
Jan 21, 2026Cadaveric studies have provided important insights into the mechanics of the human foot arch and plantar fascia. However, repeatedly probing posture-dependent viscoelastic responses immediately after landing impact is difficult in biological specimens, leaving the contribution of skeletal architecture to landing dynamics incompletely understood. In this study, we developed an anthropomimetic foot joint structure aimed at replicating the skeletal geometry of the human foot. Using a vertical drop apparatus that simulates landing and a viscoelastic system-identification model, we investigated how skeletal structure and posture modulate the apparent post-impact viscoelastic response. The results show that the multi-jointed anthropomimetic structure exhibited a higher damping ratio than simplified flat and rigid feet. Moreover, ankle dorsiflexion and toe extension systematically shifted the identified parameters, reducing the damping ratio under the tested conditions. Taken together, these findings indicate that an arch-like, multi-jointed skeletal architecture can enhance impact attenuation in an anthropomimetic mechanical foot, and that morphology and passive posture alone can tune the trade-off between attenuation and rebound. The observed posture-dependent trends are qualitatively consistent with reported differences in human landing strategies, suggesting that skeletal architecture may partly account for the modulation. Furthermore, these results highlight the engineering advantage of anatomically informed skeletal replication for achieving human-like apparent viscoelastic behavior through postural adjustment during landing.
Development of a Low-Cost Prosthetic Hand Using Electromyography and Machine Learning
Nov 23, 2024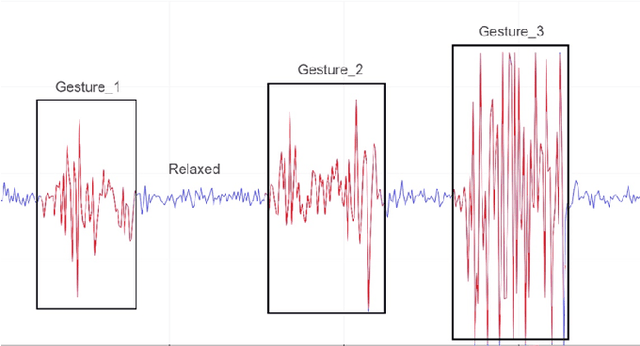
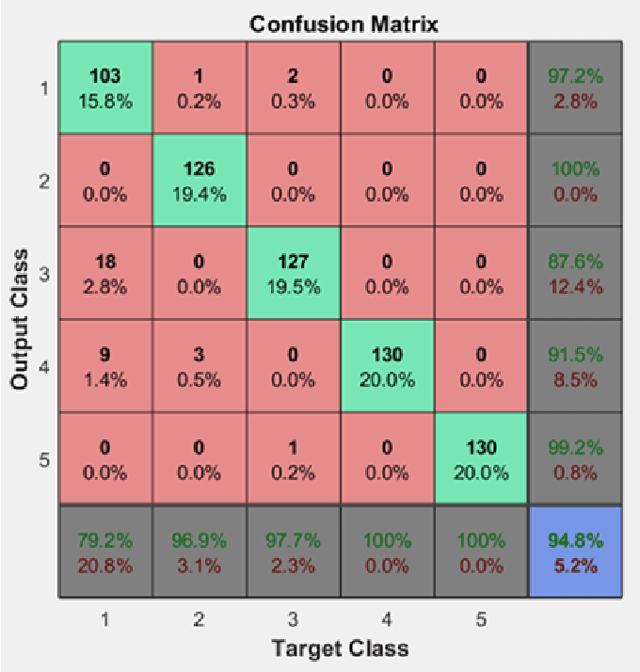
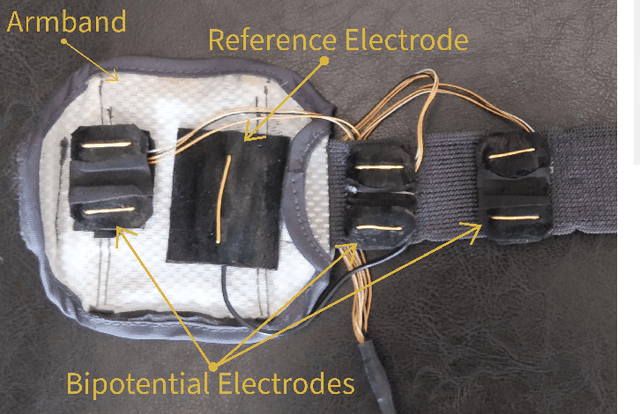
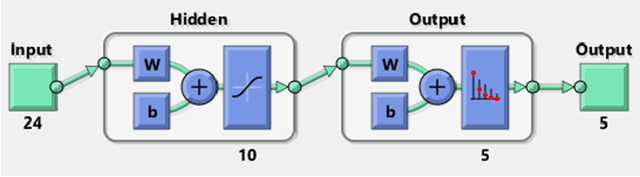
Electromyography (EMG) is a measure of muscular electrical activity and is used in many clinical/biomedical disciplines and modern human computer interaction. Myo-electric prosthetics analyze and classify the electrical signals recorded from the residual limb. The classified output is then used to control the position of motors in a robotic hand and a movement is produced. The aim of this project is to develop a low-cost and effective myo-electric prosthetic hand that would meet the needs of amputees in developing countries. The proposed prosthetic hand should be able to accurately classify five different patterns (gestures) using EMG recordings from three muscles and control a robotic hand accordingly. The robotic hand is composed of two servo motors allowing for two degrees of freedom. After establishing an efficient signal acquisition and amplification system, EMG signals were thoroughly analyzed in the frequency and time domain. Features were extracted from both domains and a shallow neural network was trained on the two sets of data. Results yielded an average classification accuracy of 97.25% and 95.85% for the time and frequency domains respectively. Furthermore, results showed a faster computation and response for the time domain analysis; hence, it was adopted for the classification system. A wrist rotation mechanism was designed and tested to add significant functionality to the prosthetic. The mechanism is controlled by two of the five gestures, one for each direction. Which added a third degree of freedom to the overall design. Finally, a tactile sensory feedback system which uses force sensors and vibration motors was developed to enable sensation of the force inflicted on the hand for the user.
Multiple-Channel Real Time Filtering for a Myoelectric Prosthetic Hand-Arm Robot System
Mar 03, 2021On the base of the developed master-slave prosthetic hand-arm robot system, which is controlled mainly based on signals obtained from bending sensors fixed on the data glove, the first idea deduced was to develop and add a multi-dimensional filter into the original control system to make the control signals cleaner and more stable at real time. By going further, a second new idea was also proposed to predict new control information based on the combination of a new algorithm and prediction control theory. In order to fulfill the first idea properly, the possible methods to process data in real time, the different ways to produce Gaussian distributed random data, the way to combine the new algorithm with the previous complex program project, and the way to simplify and reduce the running time of the algorithm to maintain the high efficiency, the real time processing with multiple channels of the sensory system and the real-time performance of the control system were researched. Eventually, the experiment on the same provided robot system gives the results of the first idea and shows the improved performance of the filter comparing with the original control method.