 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaying goodbyes to rotating your phone: Magnetometer calibration during SLAM
Sep 02, 2024



While Wi-Fi positioning is still more common indoors, using magnetic field features has become widely known and utilized as an alternative or supporting source of information. Magnetometer bias presents significant challenge in magnetic field navigation and SLAM. Traditionally, magnetometers have been calibrated using standard sphere or ellipsoid fitting methods and by requiring manual user procedures, such as rotating a smartphone in a figure-eight shape. This is not always feasible, particularly when the magnetometer is attached to heavy or fast-moving platforms, or when user behavior cannot be reliably controlled. Recent research has proposed using map data for calibration during positioning. This paper takes a step further and verifies that a pre-collected map is not needed; instead, calibration can be done as part of a SLAM process. The presented solution uses a factorized particle filter that factors out calibration in addition to the magnetic field map. The method is validated using smartphone data from a shopping mall and mobile robotics data from an office environment. Results support the claim that magnetometer calibration can be achieved during SLAM with comparable accuracy to manual calibration. Furthermore, the method seems to slightly improve manual calibration when used on top of it, suggesting potential for integrating various calibration approaches.
Beyond KNN: Deep Neighborhood Learning for WiFi-based Indoor Positioning Systems
Feb 02, 2023K-Neares Neighbors (KNN) and its variant weighted KNN (WKNN) have been explored for years in both academy and industry to provide stable and reliable performance in WiFi-based indoor positioning systems. Such algorithms estimate the location of a given point based on the locality information from the selected nearest WiFi neighbors according to some distance metrics calculated from the combination of WiFi received signal strength (RSS). However, such a process does not consider the relational information among the given point, WiFi neighbors, and the WiFi access points (WAPs). Therefore, this study proposes a novel Deep Neighborhood Learning (DNL). The proposed DNL approach converts the WiFi neighborhood to heterogeneous graphs, and utilizes deep graph learning to extract better representation of the WiFi neighborhood to improve the positioning accuracy. Experiments on 3 real industrial datasets collected from 3 mega shopping malls on 26 floors have shown that the proposed approach can reduce the mean absolute positioning error by 10% to 50% in most of the cases. Specially, the proposed approach sharply reduces the root mean squared positioning error and 95\% percentile positioning error, being more robust to the outliers than conventional KNN and WKNN.
Real-time NLOS/LOS Identification for Smartphone-based Indoor Positioning System using WiFi RTT and RSS
Apr 22, 2021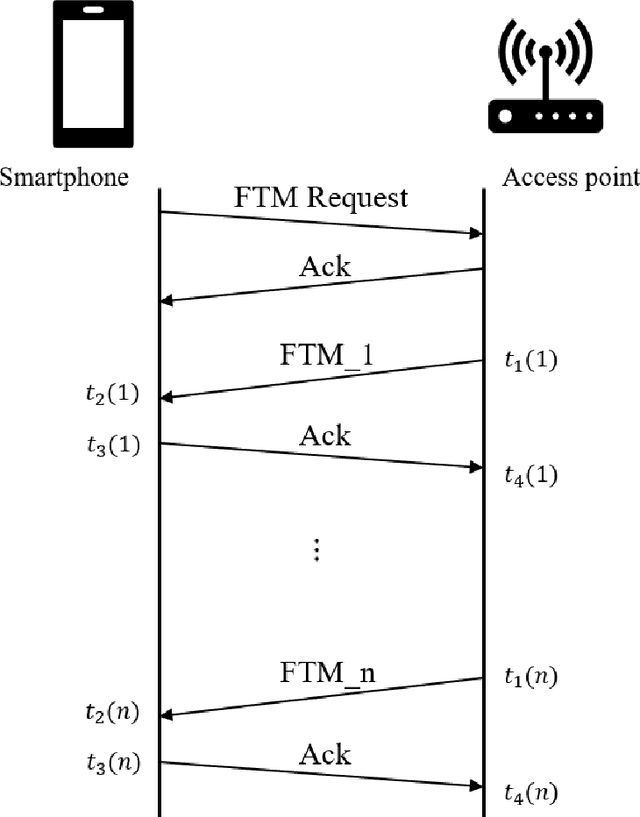
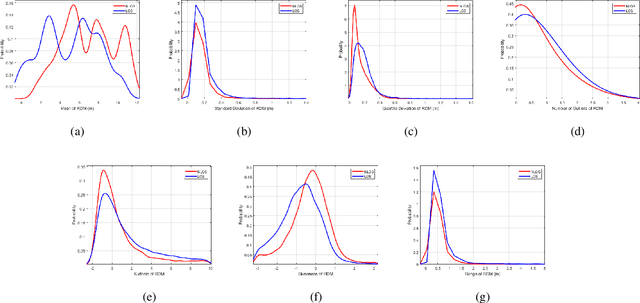
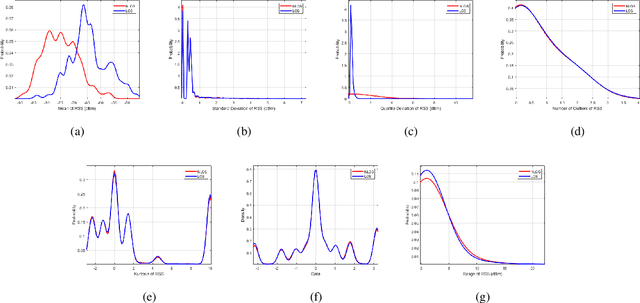
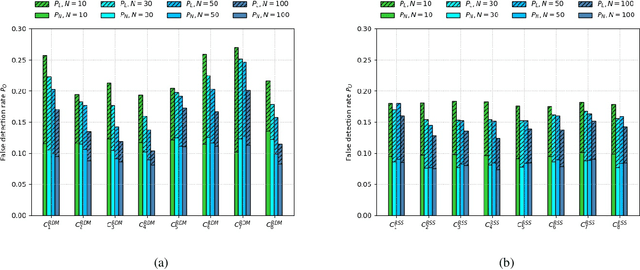
The accuracy of smartphone-based positioning methods using WiFi usually suffers from ranging errors caused by non-line-of-sight (NLOS) conditions. Previous research usually exploits several statistical features from a long time series (hundreds of samples) of WiFi received signal strength (RSS) or WiFi round-trip time (RTT) to achieve a high identification accuracy. However, the long time series or large sample size attributes to high power and time consumption in data collection for both training and testing. This will also undoubtedly be detrimental to user experience as the waiting time of getting enough samples is quite long. Therefore, this paper proposes a new real-time NLOS/LOS identification method for smartphone-based indoor positioning system using WiFi RTT and RSS. Based on our extensive analysis of RSS and RTT features, a machine learning-based method using random forest was chosen and developed to separate the samples for NLOS/LOS conditions. Experiments in different environments show that our method achieves a discrimination accuracy of about 94% with a sample size of 10. Considering the theoretically shortest WiFi ranging interval of 100ms of the RTT-enabled smartphones, our algorithm is able to provide the shortest latency of 1s to get the testing result among all of the state-of-art methods.