 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetically Actuated Millimeter-Scale Biped
Feb 22, 2023This paper introduces a new approach to studying bipedal locomotion. The approach is based on magnetically actuated miniature robots. Building prototypes of bipedal locomotion machines has been very costly and overly complicated. We demonstrate that a magnetically actuated 0.3~gm robot, we call Big Foot, can be used to test fundamental ideas without necessitating very complex and expensive bipedal machines. We explore analytically and experimentally two age old questions in bipedal locomotion: 1. Can such robots be driven with pure hip actuation. 2. Is it better to use continuous or impulsive actuation schemes. First, a numerical model has been developed in order to study the dynamics and stability of a magnetically actuated miniature robot. We particularly focus on stability and performance metrics. Then, these results are tested using Big Foot. Pure hip actuation has been successful in generating gait on uphill surfaces. In addition, complex tasks such as following prescribed gait trajectories and navigating through a maze has been successfully performed by the experimental prototype. The nature and timing of hip torques are also studied. Two actuation schemes are used: Heel Strike Actuation and Constant Pulse Wave Actuation. With each scheme, we also vary the time duration of the applied magnetic field. Heel Strike actuation is found to have superior stability, more uniform gait generation, and faster locomotion than the Constant Pulse Wave option. But, Constant Pulse Wave achieves locomotion on steeper slopes.
Feedback Control of Millimeter Scale Pivot Walkers Using Magnetic Actuation
Nov 06, 2021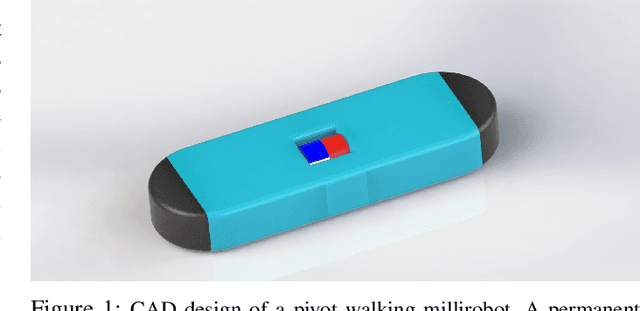
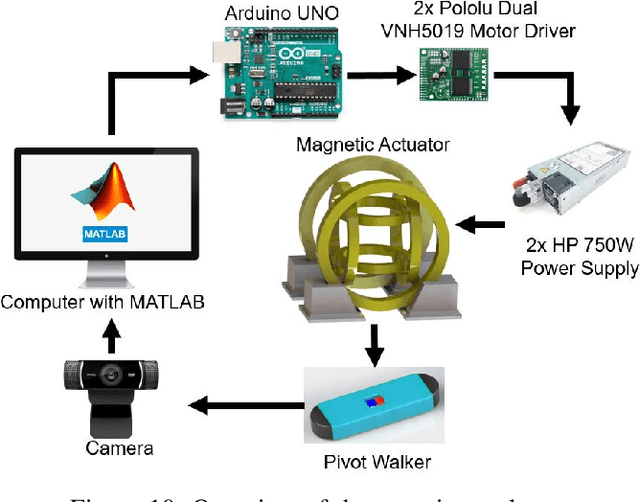
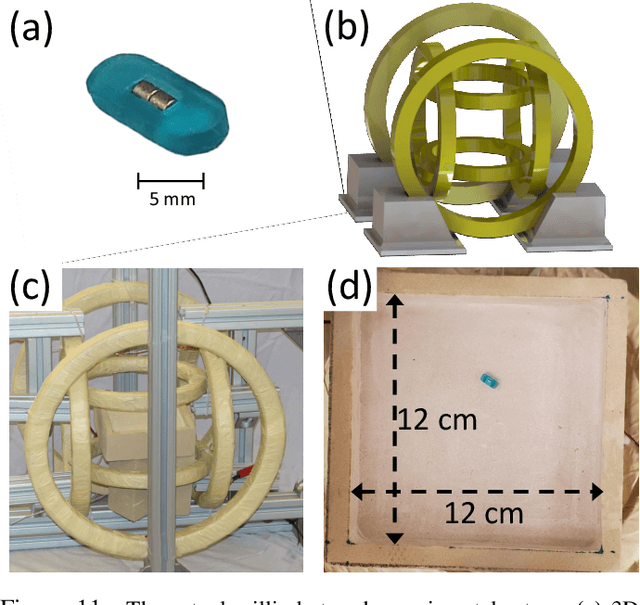
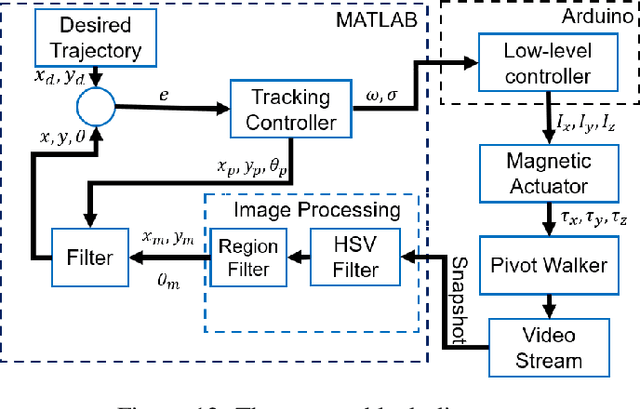
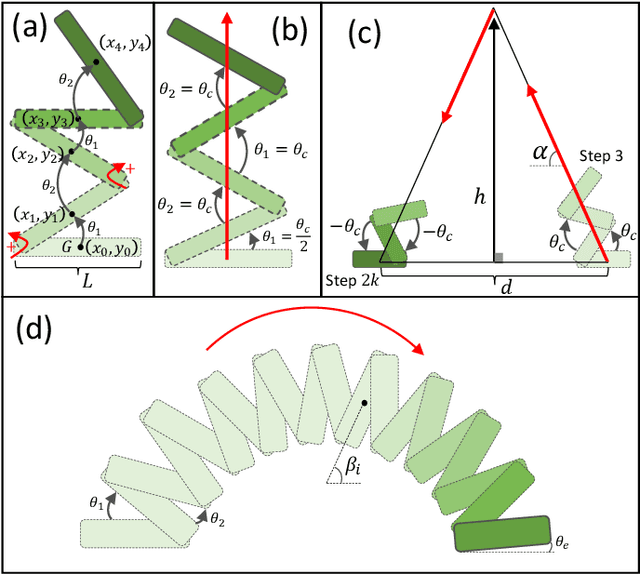
An external magnetic field can be used to remotely control small-scaled robots, making them promising candidates for diverse biomedical and engineering applications. We showed that our magnetically actuated millirobot is highly agile and can perform a variety of locomotive tasks such as pivot walking and tumbling in a horizontal plane. Here, we focus on controlling the locomotion outcomes of this millirobot in the pivot walking mode. A mathematical model of the system is developed and the kinematic model is derived. The role of the sweep and tilt angles in the robot's motion is also investigated. We propose two controllers to regulate the gait of the pivot walker. The first one is a proportional-geometric controller, which determines the correct pivot point that the millirobot should use. Then, it regulates the angular velocity proportionally based on the error between the center of the millirobot and the reference trajectory. The second controller is based on a gradient descent optimization technique, which expresses the control action as an optimization problem. These control algorithms enable the millirobot to generate a stable gait while tracking the desired trajectory. We conduct a set of different experiments and simulation runs to establish the effectiveness of proposed controllers for different sweep and tilt angles in terms of the tracking error. The two controllers exhibit an appropriate performance, but it is observed that gradient descent based controller yields faster convergence time, smaller tracking error, and fewer number of steps. Finally, we perform an extensive experimentally parametric analysis on the effect of the sweep angle, tilt angle, and step time on the tracking error. As we expect, the optimization-based controller outperforms the geometric based controller.
Swarm Control of Magnetically Actuated Millirobots
Nov 06, 2021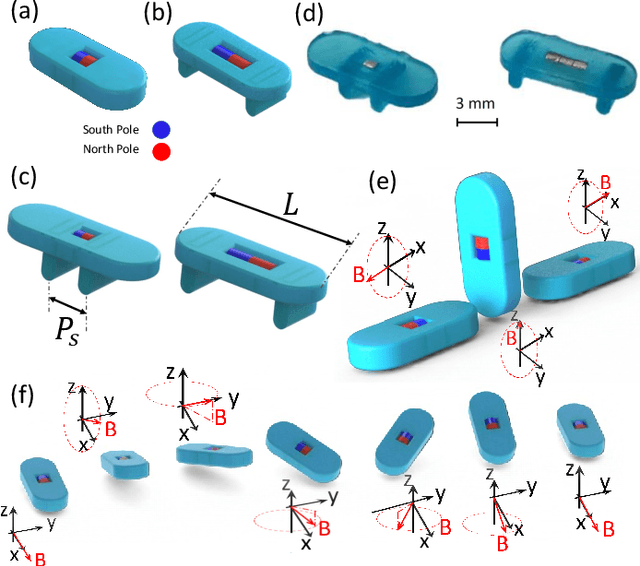
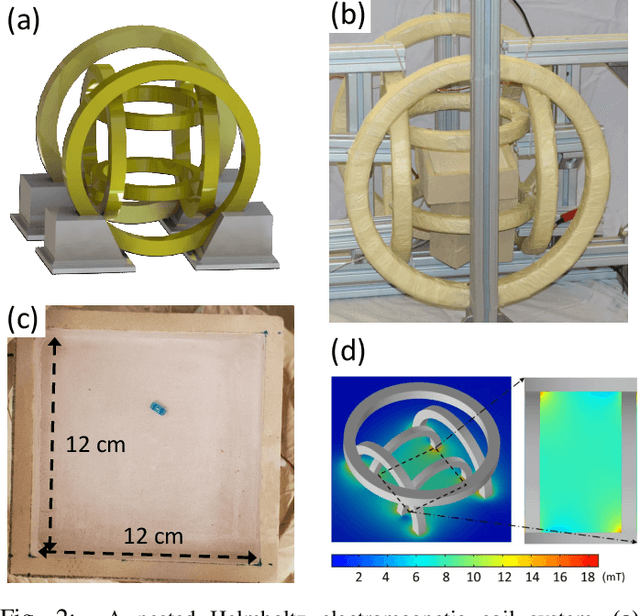
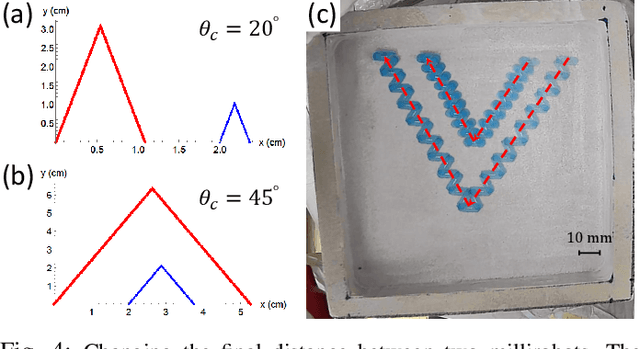
Small-size robots offer access to spaces that are inaccessible to larger ones. This type of access is crucial in applications such as drug delivery, environmental detection, and collection of small samples. However, there are some tasks that are not possible to perform using only one robot including assembly and manufacturing at small scales, manipulation of micro- and nano- objects, and robot-based structuring of small-scale materials. The solution to this problem is to use a group of robots as a system. Thus, we focus on tasks that can be achieved using a group of small-scale robots. These robots are typically externally actuated due to their size limitation. Yet, one faces the challenge of controlling a group of robots using a single global input. We propose a control algorithm to position individual members of a swarm in predefined positions. A single control input applies to the system and moves all robots in the same direction. We also add another control modality by using different length robots. An electromagnetic coil system applied external force and steered the millirobots. This millirobot can move in various modes of motion such as pivot walking and tumbling. We propose two new designs of these millirobots. In the first design, the magnets are placed at the center of body to reduce the magnetic attraction force. In the second design, the millirobots are of identical length with two extra legs acting as the pivot points. This way we vary pivot separation in design to take advantage of variable speed in pivot walking mode while keeping the speed constant in tumbling mode. This paper presents a general algorithm for positional control of n millirobots with different lengths to move them from given initial positions to final desired ones. This method is based on choosing a leader that is fully controllable. Simulations and hardware experiments validate these results.