 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback Control of Millimeter Scale Pivot Walkers Using Magnetic Actuation
Paper and Code
Nov 06, 2021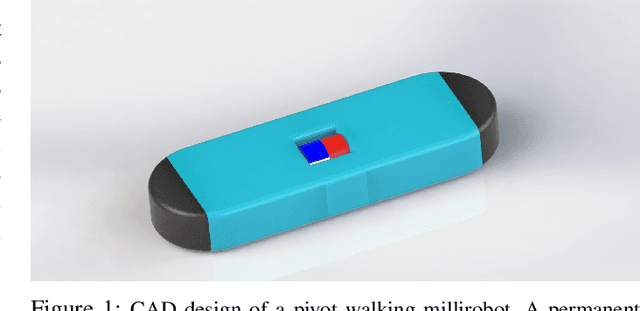
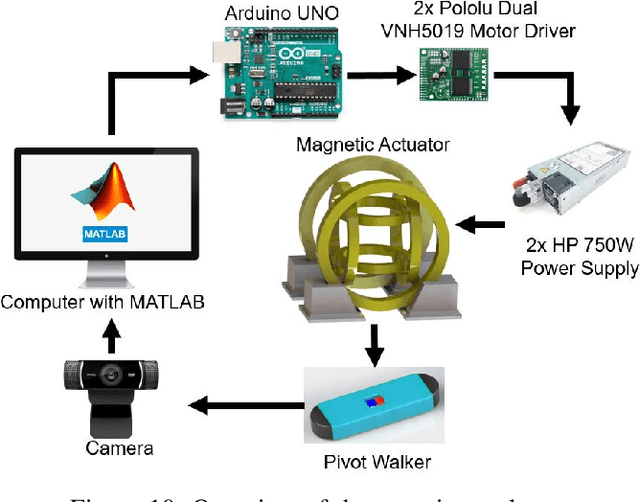
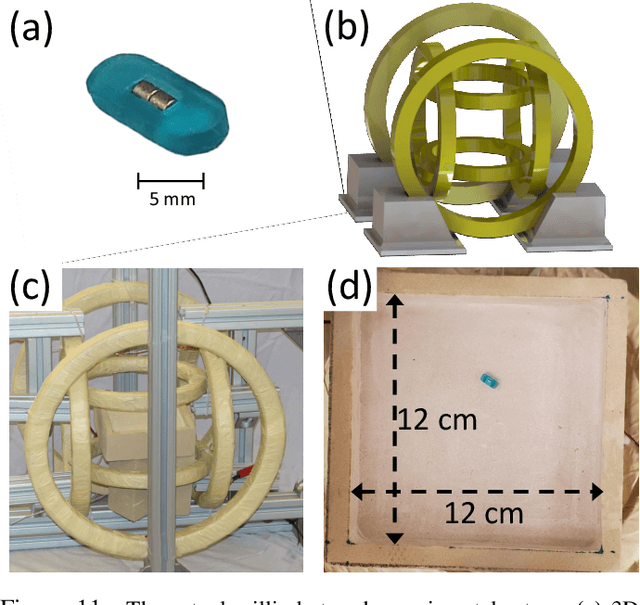
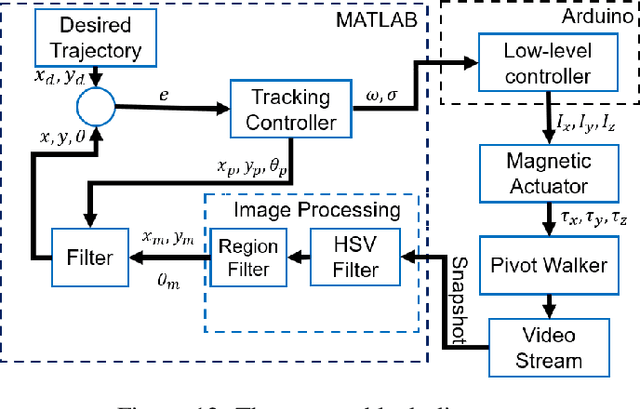
An external magnetic field can be used to remotely control small-scaled robots, making them promising candidates for diverse biomedical and engineering applications. We showed that our magnetically actuated millirobot is highly agile and can perform a variety of locomotive tasks such as pivot walking and tumbling in a horizontal plane. Here, we focus on controlling the locomotion outcomes of this millirobot in the pivot walking mode. A mathematical model of the system is developed and the kinematic model is derived. The role of the sweep and tilt angles in the robot's motion is also investigated. We propose two controllers to regulate the gait of the pivot walker. The first one is a proportional-geometric controller, which determines the correct pivot point that the millirobot should use. Then, it regulates the angular velocity proportionally based on the error between the center of the millirobot and the reference trajectory. The second controller is based on a gradient descent optimization technique, which expresses the control action as an optimization problem. These control algorithms enable the millirobot to generate a stable gait while tracking the desired trajectory. We conduct a set of different experiments and simulation runs to establish the effectiveness of proposed controllers for different sweep and tilt angles in terms of the tracking error. The two controllers exhibit an appropriate performance, but it is observed that gradient descent based controller yields faster convergence time, smaller tracking error, and fewer number of steps. Finally, we perform an extensive experimentally parametric analysis on the effect of the sweep angle, tilt angle, and step time on the tracking error. As we expect, the optimization-based controller outperforms the geometric based controller.