 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePNeRF: Probabilistic Neural Scene Representations for Uncertain 3D Visual Mapping
Sep 23, 2022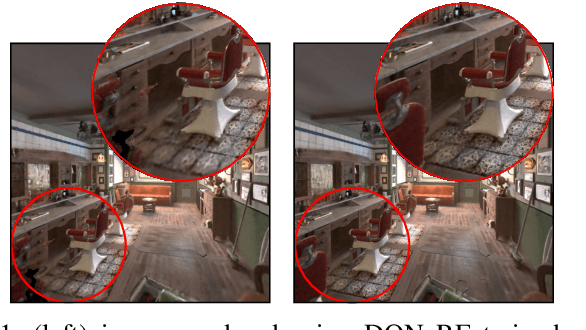
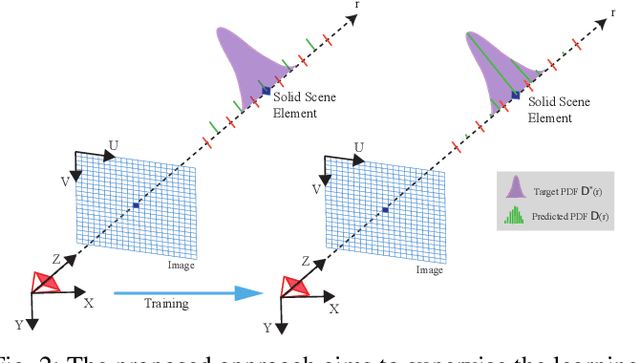
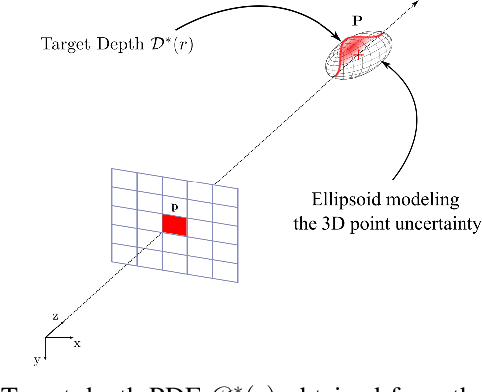
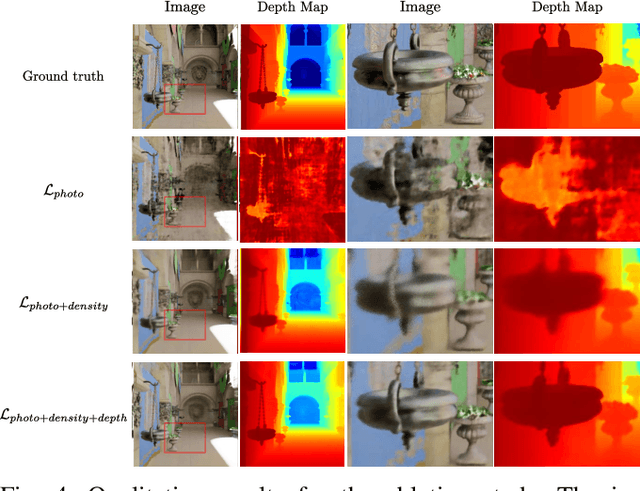
Recently neural scene representations have provided very impressive results for representing 3D scenes visually, however, their study and progress have mainly been limited to visualization of virtual models in computer graphics or scene reconstruction in computer vision without explicitly accounting for sensor and pose uncertainty. Using this novel scene representation in robotics applications, however, would require accounting for this uncertainty in the neural map. The aim of this paper is therefore to propose a novel method for training {\em probabilistic neural scene representations} with uncertain training data that could enable the inclusion of these representations in robotics applications. Acquiring images using cameras or depth sensors contains inherent uncertainty, and furthermore, the camera poses used for learning a 3D model are also imperfect. If these measurements are used for training without accounting for their uncertainty, then the resulting models are non-optimal, and the resulting scene representations are likely to contain artifacts such as blur and un-even geometry. In this work, the problem of uncertainty integration to the learning process is investigated by focusing on training with uncertain information in a probabilistic manner. The proposed method involves explicitly augmenting the training likelihood with an uncertainty term such that the learnt probability distribution of the network is minimized with respect to the training uncertainty. It will be shown that this leads to more accurate image rendering quality, in addition to more precise and consistent geometry. Validation has been carried out on both synthetic and real datasets showing that the proposed approach outperforms state-of-the-art methods. The results show notably that the proposed method is capable of rendering novel high-quality views even when the training data is limited.
Mip-NeRF RGB-D: Depth Assisted Fast Neural Radiance Fields
May 19, 2022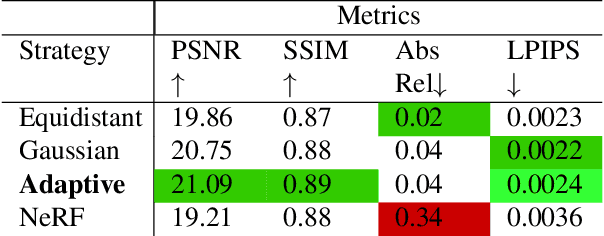
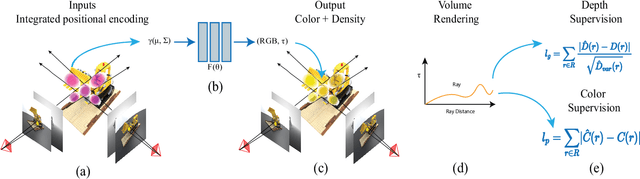
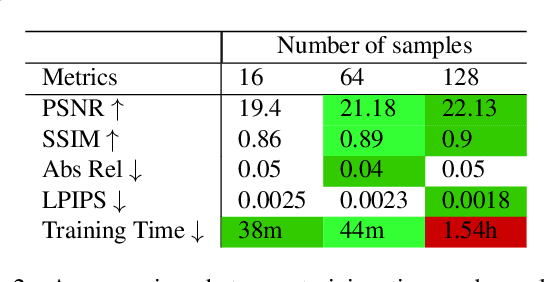
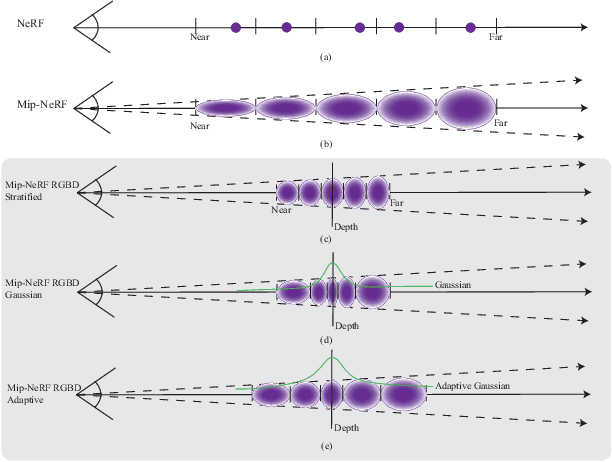
Neural scene representations, such as neural radiance fields (NeRF), are based on training a multilayer perceptron (MLP) using a set of color images with known poses. An increasing number of devices now produce RGB-D information, which has been shown to be very important for a wide range of tasks. Therefore, the aim of this paper is to investigate what improvements can be made to these promising implicit representations by incorporating depth information with the color images. In particular, the recently proposed Mip-NeRF approach, which uses conical frustums instead of rays for volume rendering, allows one to account for the varying area of a pixel with distance from the camera center. The proposed method additionally models depth uncertainty. This allows to address major limitations of NeRF-based approaches including improving the accuracy of geometry, reduced artifacts, faster training time, and shortened prediction time. Experiments are performed on well-known benchmark scenes, and comparisons show improved accuracy in scene geometry and photometric reconstruction, while reducing the training time by 3 - 5 times.