 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting change in time production -- A machine learning approach to time perception
Dec 17, 2024Time perception research has advanced significantly over the years. However, some areas remain largely unexplored. This study addresses two such under-explored areas in timing research: (1) A quantitative analysis of time perception at an individual level, and (2) Time perception in an ecological setting. In this context, we trained a machine learning model to predict the direction of change in an individual's time production. The model's training data was collected using an ecologically valid setup. We moved closer to an ecological setting by conducting an online experiment with 995 participants performing a time production task that used naturalistic videos (no audio) as stimuli. The model achieved an accuracy of 61%. This was 10 percentage points higher than the baseline models derived from cognitive theories of timing. The model performed equally well on new data from a second experiment, providing evidence of its generalization capabilities. The model's output analysis revealed that it also contained information about the magnitude of change in time production. The predictions were further analysed at both population and individual level. It was found that a participant's previous timing performance played a significant role in determining the direction of change in time production. By integrating attentional-gate theories from timing research with feature importance techniques from machine learning, we explained model predictions using cognitive theories of timing. The model and findings from this study have potential applications in systems involving human-computer interactions where understanding and predicting changes in user's time perception can enable better user experience and task performance.
Minimalistic Collective Perception with Imperfect Sensors
Sep 26, 2022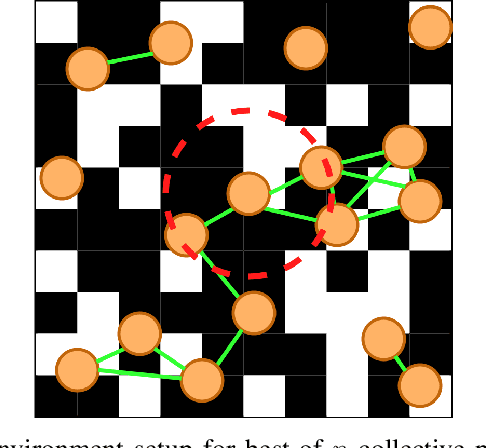
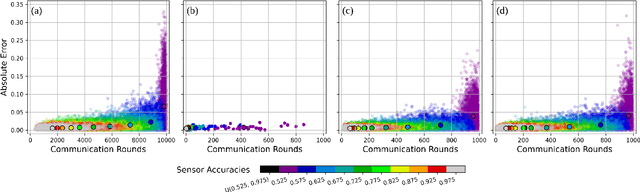

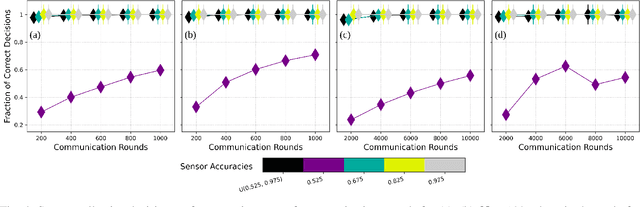
Collective perception is a foundational problem in swarm robotics, in which the swarm must reach consensus on a coherent representation of the environment. An important variant of collective perception casts it as a best-of-$n$ decision-making process, in which the swarm must identify the most likely representation out of a set of alternatives. Past work on this variant primarily focused on characterizing how different algorithms navigate the speed-vs-accuracy tradeoff in a scenario where the swarm must decide on the most frequent environmental feature. Crucially, past work on best-of-$n$ decision-making assumes the robot sensors to be perfect (noise- and fault-less), limiting the real-world applicability of these algorithms. In this paper, we derive from first principles an optimal, probabilistic framework for minimalistic swarm robots equipped with flawed sensors. Then, we validate our approach in a scenario where the swarm collectively decides the frequency of a certain environmental feature. We study the speed and accuracy of the decision-making process with respect to several parameters of interest. Our approach can provide timely and accurate frequency estimates even in presence of severe sensory noise.