 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuddle: Parallel Shape Assembly using Decentralized, Minimalistic Robots
Mar 18, 2026We propose a novel algorithm for forming arbitrarily shaped assemblies using decentralized robots. By relying on local interactions, the algorithm ensures there are no unreachable states or gaps in the assembly, which are global properties. The in-assembly robots attract passing-by robots into expanding the assembly via a simple implementation of signaling and alignment. Our approach is minimalistic, requiring only communication between attached, immediate neighbors. It is motion-agnostic and requires no pose localization, enabling asynchronous and order-independent assembly. We prove the algorithm's correctness and demonstrate its effectiveness in forming a 107-robot assembly.
BayesCPF: Enabling Collective Perception in Robot Swarms with Degrading Sensors
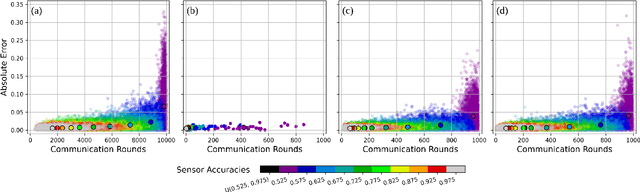
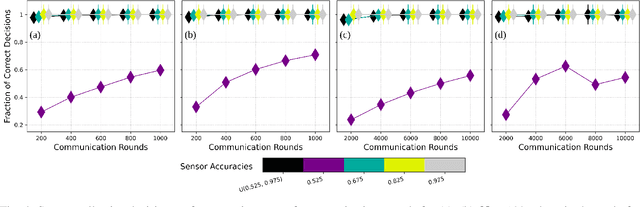
Apr 07, 2025The collective perception problem -- where a group of robots perceives its surroundings and comes to a consensus on an environmental state -- is a fundamental problem in swarm robotics. Past works studying collective perception use either an entire robot swarm with perfect sensing or a swarm with only a handful of malfunctioning members. A related study proposed an algorithm that does account for an entire swarm of unreliable robots but assumes that the sensor faults are known and remain constant over time. To that end, we build on that study by proposing the Bayes Collective Perception Filter (BayesCPF) that enables robots with continuously degrading sensors to accurately estimate the fill ratio -- the rate at which an environmental feature occurs. Our main contribution is the Extended Kalman Filter within the BayesCPF, which helps swarm robots calibrate for their time-varying sensor degradation. We validate our method across different degradation models, initial conditions, and environments in simulated and physical experiments. Our findings show that, regardless of degradation model assumptions, fill ratio estimation using the BayesCPF is competitive to the case if the true sensor accuracy is known, especially when assumptions regarding the model and initial sensor accuracy levels are preserved.
Adaptive Self-Calibration for Minimalistic Collective Perception by Imperfect Robot Swarms
Oct 28, 2024



Collective perception is a fundamental problem in swarm robotics, often cast as best-of-$n$ decision-making. Past studies involve robots with perfect sensing or with small numbers of faulty robots. We previously addressed these limitations by proposing an algorithm, here referred to as Minimalistic Collective Perception (MCP) [arxiv:2209.12858], to reach correct decisions despite the entire swarm having severely damaged sensors. However, this algorithm assumes that sensor accuracy is known, which may be infeasible in reality. In this paper, we eliminate this assumption to (i) investigate the decline of estimation performance and (ii) introduce an Adaptive Sensor Degradation Filter (ASDF) to mitigate the decline. We combine the MCP algorithm and a hypothesis test to enable adaptive self-calibration of robots' assumed sensor accuracy. We validate our approach across several parameters of interest. Our findings show that estimation performance by a swarm with correctly known accuracy is superior to that by a swarm unaware of its accuracy. However, the ASDF drastically mitigates the damage, even reaching the performance levels of robots aware a priori of their correct accuracy.
Minimalistic Collective Perception with Imperfect Sensors
Sep 26, 2022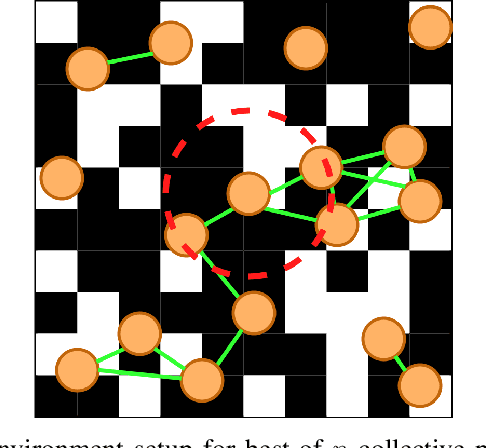

Collective perception is a foundational problem in swarm robotics, in which the swarm must reach consensus on a coherent representation of the environment. An important variant of collective perception casts it as a best-of-$n$ decision-making process, in which the swarm must identify the most likely representation out of a set of alternatives. Past work on this variant primarily focused on characterizing how different algorithms navigate the speed-vs-accuracy tradeoff in a scenario where the swarm must decide on the most frequent environmental feature. Crucially, past work on best-of-$n$ decision-making assumes the robot sensors to be perfect (noise- and fault-less), limiting the real-world applicability of these algorithms. In this paper, we derive from first principles an optimal, probabilistic framework for minimalistic swarm robots equipped with flawed sensors. Then, we validate our approach in a scenario where the swarm collectively decides the frequency of a certain environmental feature. We study the speed and accuracy of the decision-making process with respect to several parameters of interest. Our approach can provide timely and accurate frequency estimates even in presence of severe sensory noise.