 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffects of Design and Hydrodynamic Parameters on Optimized Swimming for Simulated, Fish-inspired Robots
Nov 10, 2021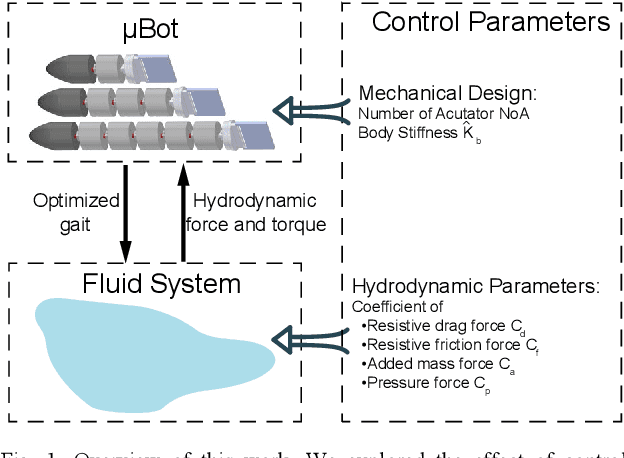
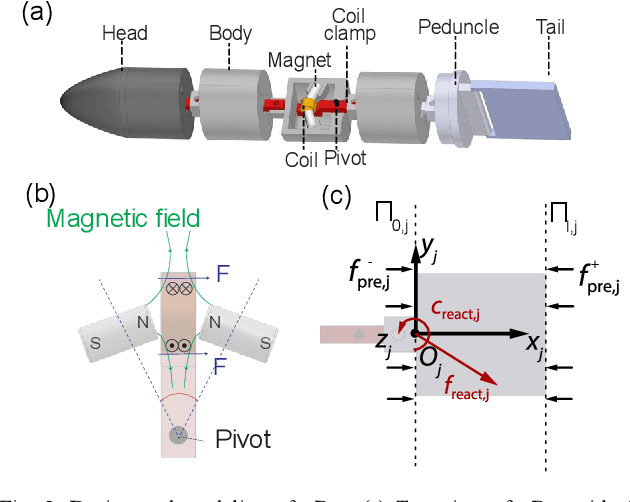
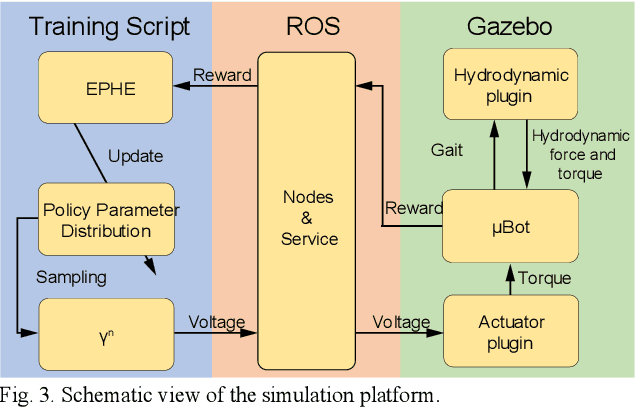
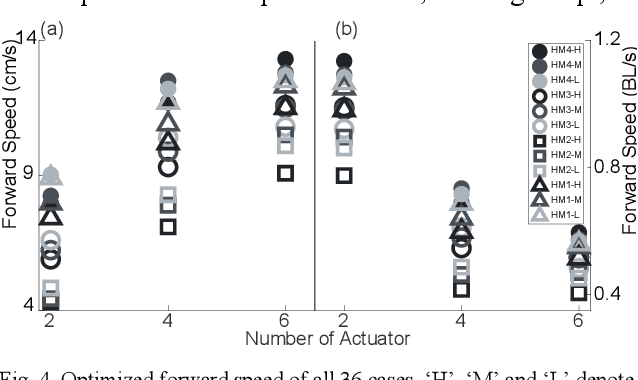
In this work we developed a mathematical model and a simulation platform for a fish-inspired robotic template, namely Magnetic, Modular, Undulatory Robotics ($\mu$Bots). Through this platform, we systematically explored the effects of design and fluid parameters on the swimming performance via reinforcement learning. The mathematical model was composed of two interacting subsystems, the robot dynamics and the hydrodynamics, and the hydrodynamic model consisted of reactive components (added-mass and pressure forces) and resistive components (drag and friction forces), which were then nondimensionalized for deriving key "control parameters" of robot-fluid interaction. The $\mu$Bot was actuated via magnetic actuators controlled with harmonic voltage signals, which were optimized via EM-based Policy Hyper Parameter Exploration (EPHE) to maximize swimming speed. By varying the control parameters, total 36 cases with different robot template variations (Number of Actuation (NoA) and stiffness) and hydrodynamic parameters were simulated and optimized via EPHE. Results showed that wavelength of optimized gaits (i.e., traveling wave along body) was independent of template variations and hydrodynamic parameters. Higher NoA yielded higher speed but lower speed per body length however with diminishing gain and lower speed per body length. Body and caudal-fin gait dynamics were dominated by the interaction among fluid added-mass, spring, and actuation torque, with negligible contribution from fluid resistive drag. In contrast, thrust generation was dominated by pressure force acting on caudal fin, as steady swimming resulted from a balance between resistive force and pressure force, with minor contributions from added-mass and body drag forces. Therefore, added-mass force only indirectly affected the thrust generation and swimming speed via the caudal fin dynamics.
State-space aerodynamic model reveals high force control authority and predictability in flapping flight
Mar 14, 2021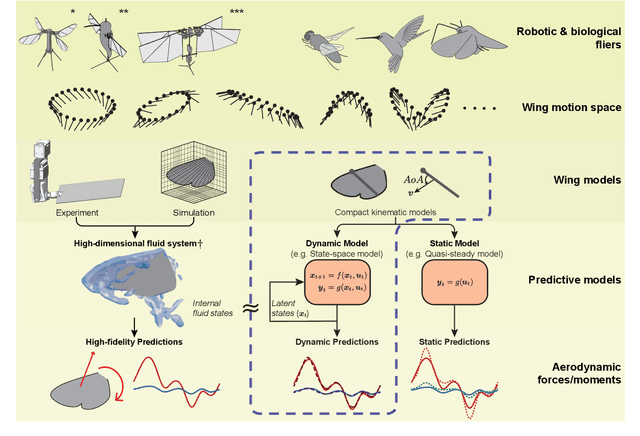
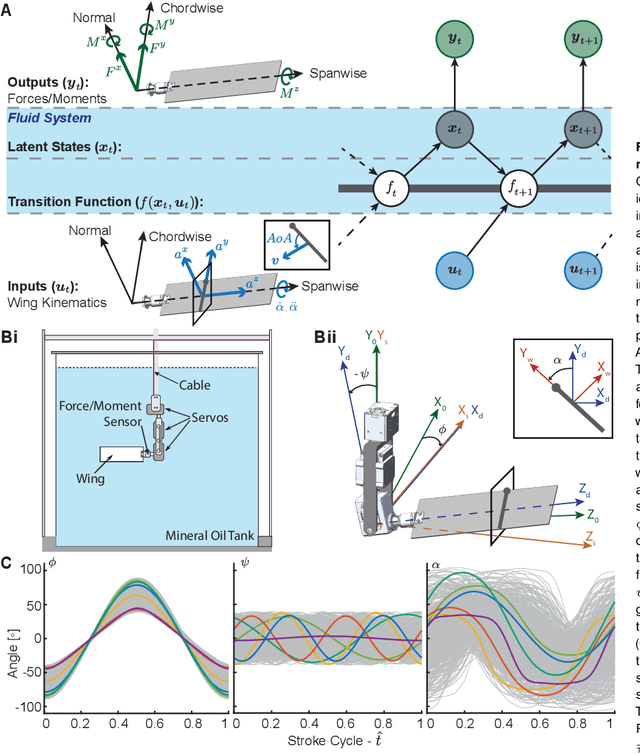
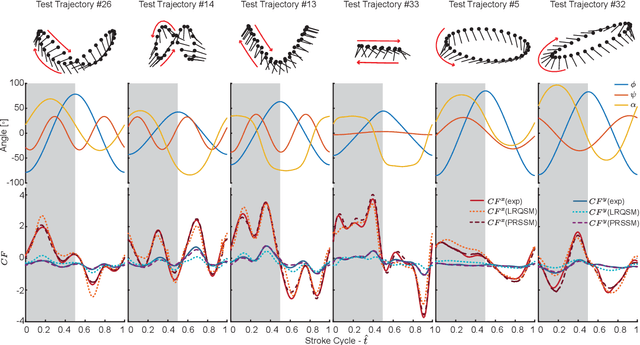
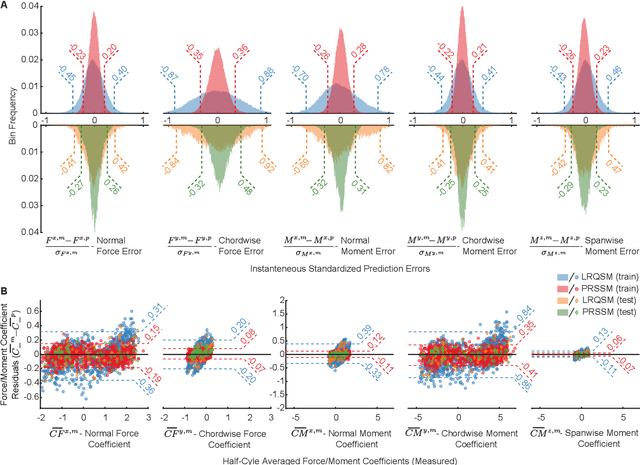
Flying animals resort to fast, large-degree-of-freedom motion of flapping wings (i.e., their aerodynamic surfaces), a key feature that distinguishes them from rotary or fixed-winged robotic fliers with relatively limited motion of aerodynamic surfaces. However, it is well known that flapping-wing aerodynamics are characterised by highly unsteady and three-dimensional flows difficult to model or control. Accurate aerodynamic force predictions often rely on high-fidelity and expensive computational or experimental methods. Here, we developed a computationally efficient model that can accurately predict aerodynamic forces generated by 548 different flapping-wing motions, surpassing the predictive accuracy and generality of the existing quasi-steady models. Specifically, we trained a state-space model that dynamically mapped wing motion kinematics to aerodynamic forces and moments measured from a dynamically scaled robotic wing. This predictive model used as few as 12 states to successfully capture the unsteady and nonlinear fluid effects pertinent to force generation without explicit information of fluid flows. Also, we provided a comprehensive assessment of the control authority of key wing kinematic variables and their linear predictability of aerodynamic forces. We found that instantaneous aerodynamic forces/moments were largely predictable by the wing motion history within a half stroke cycle. Furthermore, the angle of attack, normal acceleration, and pitching motion had the strongest and the most instant effects on the aerodynamic force/moment generation. Our results show that flapping flight offers inherently high force control authority and predictability, which are key to the development of agile and stable aerial fliers.