 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges of YOLO Series for Object Detection in Extremely Heavy Rain: CALRA Simulator based Synthetic Evaluation Dataset
Dec 14, 2023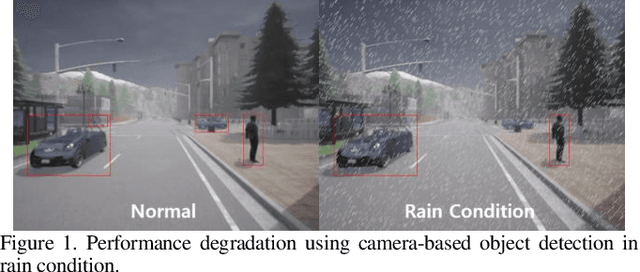
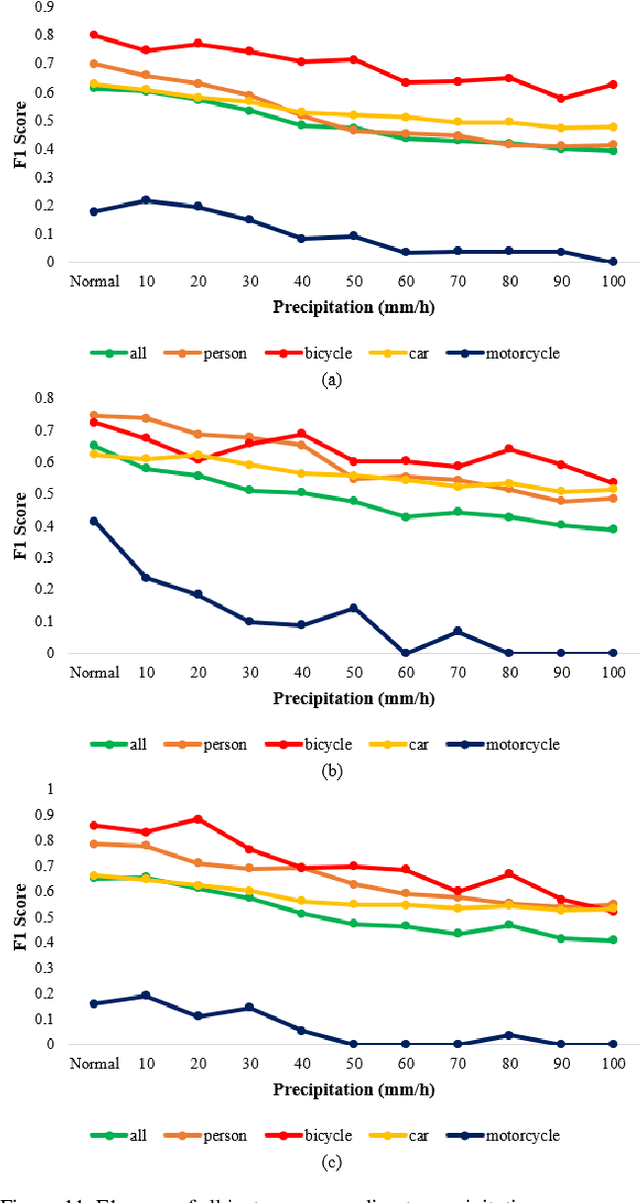
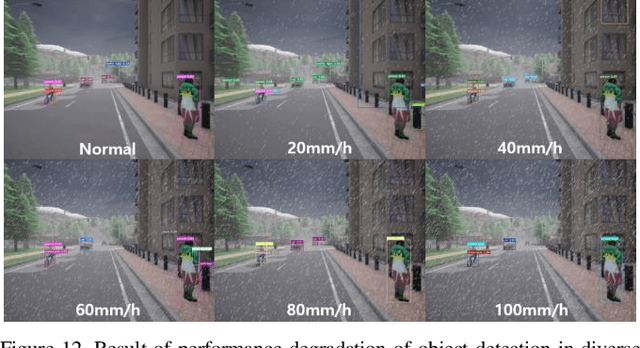

Recently, as many studies of autonomous vehicles have been achieved for levels 4 and 5, there has been also increasing interest in the advancement of perception, decision, and control technologies, which are the three major aspects of autonomous vehicles. As for the perception technologies achieving reliable maneuvering of autonomous vehicles, object detection by using diverse sensors (e.g., LiDAR, radar, and camera) should be prioritized. These sensors require to detect objects accurately and quickly in diverse weather conditions, but they tend to have challenges to consistently detect objects in bad weather conditions with rain, snow, or fog. Thus, in this study, based on the experimentally obtained raindrop data from precipitation conditions, we constructed a novel dataset that could test diverse network model in various precipitation conditions through the CARLA simulator. Consequently, based on our novel dataset, YOLO series, a one-stage-detector, was used to quantitatively verify how much object detection performance could be decreased under various precipitation conditions from normal to extreme heavy rain situations.