 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscretization and Stabilization of Energy-Based Controller for Period Switching Control and Flexible Scheduling
Jun 13, 2022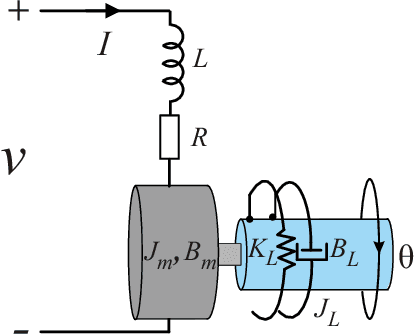
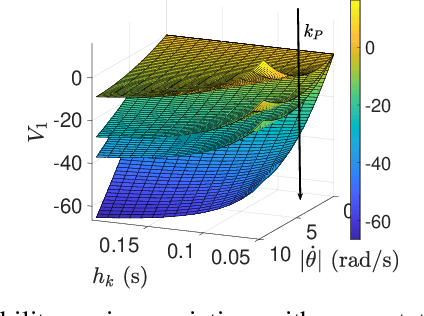
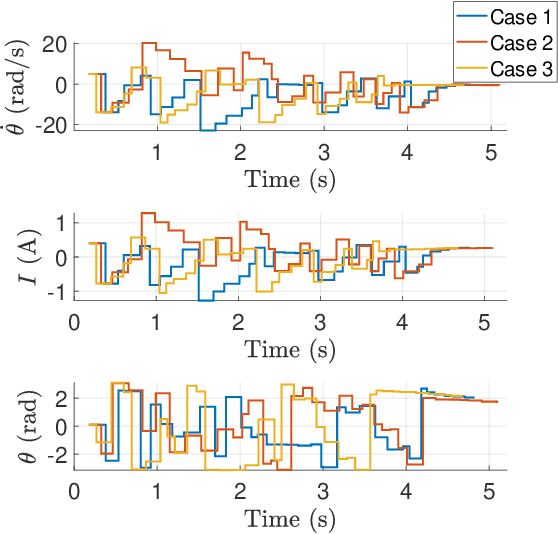
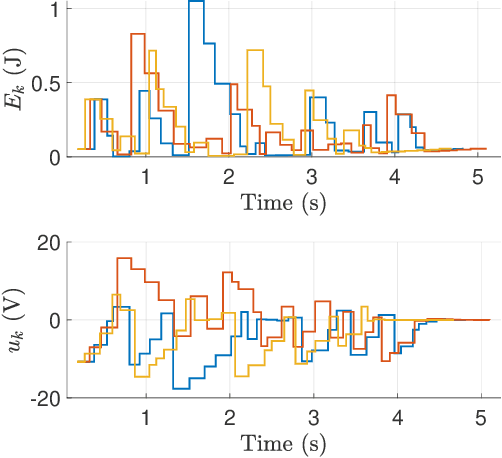
Emerging advanced control applications, with increased complexity in software but limited computing resources, suggest that real-time controllers should have adaptable designs. These control strategies also should be designed with consideration of the run-time behavior of the system. One of such research attempts is to design the controller along with the task scheduler, known as control-scheduling co-design, for more predictable timing behavior as well as surviving system overloads. Unlike traditional controller designs, which have equal-distance sampling periods, the co-design approach increases the system flexibility and resilience by explicitly considering timing properties, for example using an event-based controller or with multiple sampling times (non-uniform sampling and control). Within this context, we introduce the first work on the discretization of an energy-based controller that can switch arbitrarily between multiple periods and adjust the control parameters accordingly without destabilizing the system. A digital controller design based on this paradigm for a DC motor with an elastic load as an example is introduced and the stability condition is given based on the proposed Lyapunov function. The method is evaluated with various computer-based simulations which demonstrate its effectiveness.
Line-Circle-Square (LCS): A Multilayered Geometric Filter for Edge-Based Detection
Sep 02, 2020



This paper presents a state-of-the-art filter that reduces the complexity in object detection, tracking and mapping applications. Existing edge detection and tracking methods are proposed to create suitable autonomy for mobile robots, however many of them face overconfidence and large computations at the entrance to scenarios with an immense number of landmarks. In particular, it is not practically efficient to solely rely on limited sensors such as a camera. The method in this work, the Line-Circle-Square (LCS) filter, claims that mobile robots without a large database for object recognition and highly advanced prediction methods can deal with incoming objects that the camera captures in real-time. The proposed filter applies detection, tracking and learning to each defined expert to extract more information for judging scenes without over-calculation. The interactive learning feed between each expert creates a minimal error that works against overwhelming detected features in crowded scenes. Our experts are dependent on trust factors' covariance under the geometric definitions to ignore, emerge and compare detected landmarks. The experiment validates the effectiveness of the proposed filter in terms of detection precision and resource usage.