 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexterous Manipulation Transfer via Progressive Kinematic-Dynamic Alignment
Nov 14, 2025The inherent difficulty and limited scalability of collecting manipulation data using multi-fingered robot hand hardware platforms have resulted in severe data scarcity, impeding research on data-driven dexterous manipulation policy learning. To address this challenge, we present a hand-agnostic manipulation transfer system. It efficiently converts human hand manipulation sequences from demonstration videos into high-quality dexterous manipulation trajectories without requirements of massive training data. To tackle the multi-dimensional disparities between human hands and dexterous hands, as well as the challenges posed by high-degree-of-freedom coordinated control of dexterous hands, we design a progressive transfer framework: first, we establish primary control signals for dexterous hands based on kinematic matching; subsequently, we train residual policies with action space rescaling and thumb-guided initialization to dynamically optimize contact interactions under unified rewards; finally, we compute wrist control trajectories with the objective of preserving operational semantics. Using only human hand manipulation videos, our system automatically configures system parameters for different tasks, balancing kinematic matching and dynamic optimization across dexterous hands, object categories, and tasks. Extensive experimental results demonstrate that our framework can automatically generate smooth and semantically correct dexterous hand manipulation that faithfully reproduces human intentions, achieving high efficiency and strong generalizability with an average transfer success rate of 73%, providing an easily implementable and scalable method for collecting robot dexterous manipulation data.
Cross-Category Functional Grasp Tansfer
May 14, 2024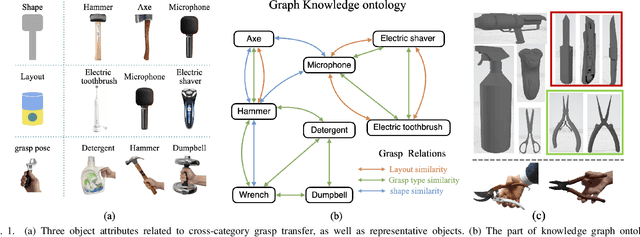
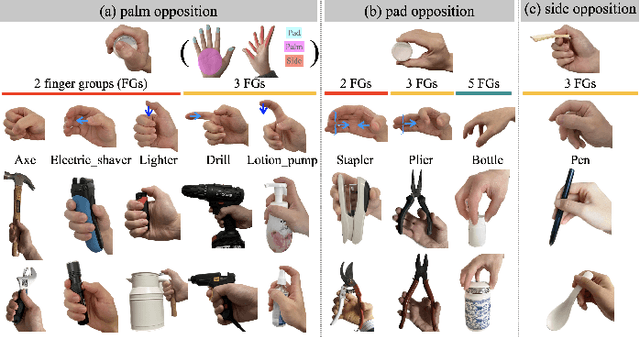
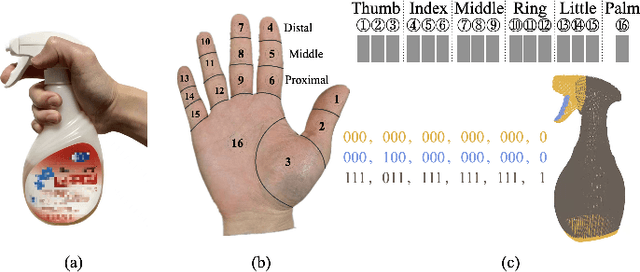
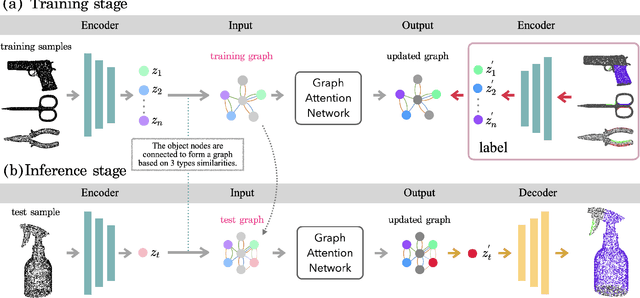
The grasp generation of dexterous hand often requires a large number of grasping annotations. Especially for functional grasp-requiring the grasp pose to be convenient for the subsequent use of the object. However, annotating high DoF dexterous hand pose is rather challenging. This prompt us to explore how people achieve manipulations on new objects based on past grasp experiences. We find that people are adept at discovering and leveraging various similarities between objects when grasping new items, including shape, layout, and grasp type. In light of this, we analyze and collect grasp-related similarity relationships among 51 common tool-like object categories and annotate semantic grasp representation for 1768 objects. These data are organized into the form of a knowledge graph, which helps infer our proposed cross-category functional grasp synthesis. Through extensive experiments, we demonstrate that the grasp-related knowledge indeed contributed to achieving functional grasp transfer across unknown or entirely new categories of objects. We will publicly release the dataset and code to facilitate future research.
Adaptive Motion Planning for Multi-fingered Functional Grasp via Force Feedback
Jan 22, 2024Enabling multi-fingered robots to grasp and manipulate objects with human-like dexterity is especially challenging during the dynamic, continuous hand-object interactions. Closed-loop feedback control is essential for dexterous hands to dynamically finetune hand poses when performing precise functional grasps. This work proposes an adaptive motion planning method based on deep reinforcement learning to adjust grasping poses according to real-time feedback from joint torques from pre-grasp to goal grasp. We find the multi-joint torques of the dexterous hand can sense object positions through contacts and collisions, enabling real-time adjustment of grasps to generate varying grasping trajectories for objects in different positions. In our experiments, the performance gap with and without force feedback reveals the important role of force feedback in adaptive manipulation. Our approach utilizing force feedback preliminarily exhibits human-like flexibility, adaptability, and precision.