 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance of UAV-based Cell-free mMIMO ISAC Networks: Tethered vs. Mobile
May 10, 2024



The employment of unmanned aerial vehicles (UAVs) aligned with multistatic sensing in integrated sensing and communication (ISAC) systems can provide remarkable performance gains in sensing, by taking advantage of the cell-free massive multiple-input multiple-output (mMIMO) architecture. Under these considerations, in this paper, the achievable sensing signal-to-noise-plus-interference ratio (SINR) of a cell-free mMIMO ISAC UAV-based network is evaluated for two different deployments of UAVs, namely, mobile and tethered. In both scenarios, a transmit precoder that jointly optimizes the sensing and communication requirements subjected to power constraints is designed. Specifically, for the scenario with mobile UAVs, beyond the transmit precoding, we also optimize the position of the transmit UAVs through particle swarm optimization (PSO). The results show that, although tethered UAVs have a more efficient power allocation, the proposed position control algorithm for the mobile UAVs can achieve a superior gain in terms of sensing SINR.
A Framework for UAV-based Distributed Sensing Under Half-Duplex Operation
Feb 21, 2023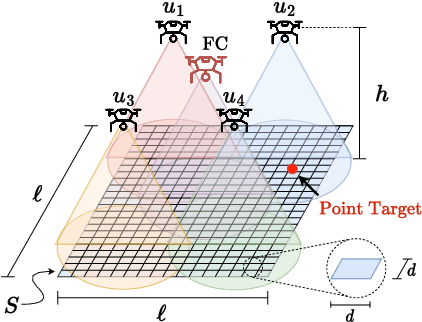
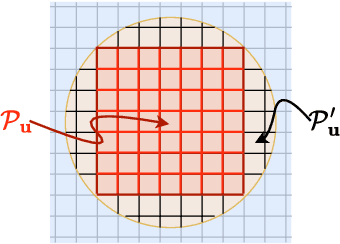
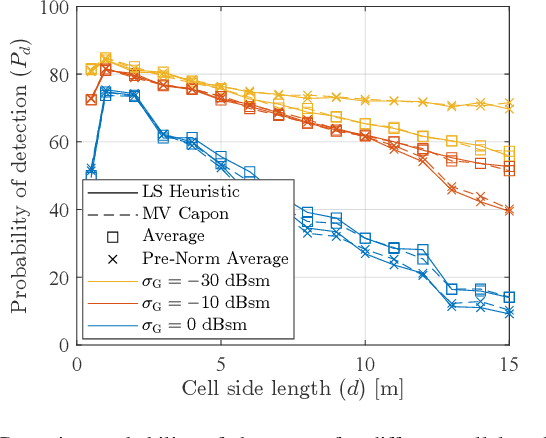
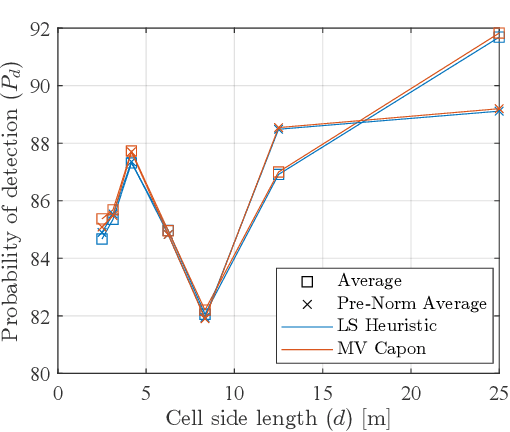
This paper proposes an unmanned aerial vehicle (UAV)-based distributed sensing framework that uses frequency-division multiplexing (OFDM) waveforms to detect the position of a ground target under half-duplex operation. The area of interest, where the target is located, is sectioned into a grid of cells, where the radar cross-section (RCS) of every cell is jointly estimated by the UAVs, and a central node acts as a fusion center by receiving all the estimations and performing information-level fusion. For local estimation at each UAV, the periodogram approach is utilised, and a digital receive beamformer is assumed. The fused RCS estimates of the grid are used to estimate the cell containing the target. Monte Carlo simulations are performed to obtain the detection probability of the proposed framework, and our results show that the proposed framework attains improved accuracy for the detection of a target than other OFDM bi-static radar approaches proposed in the literature.